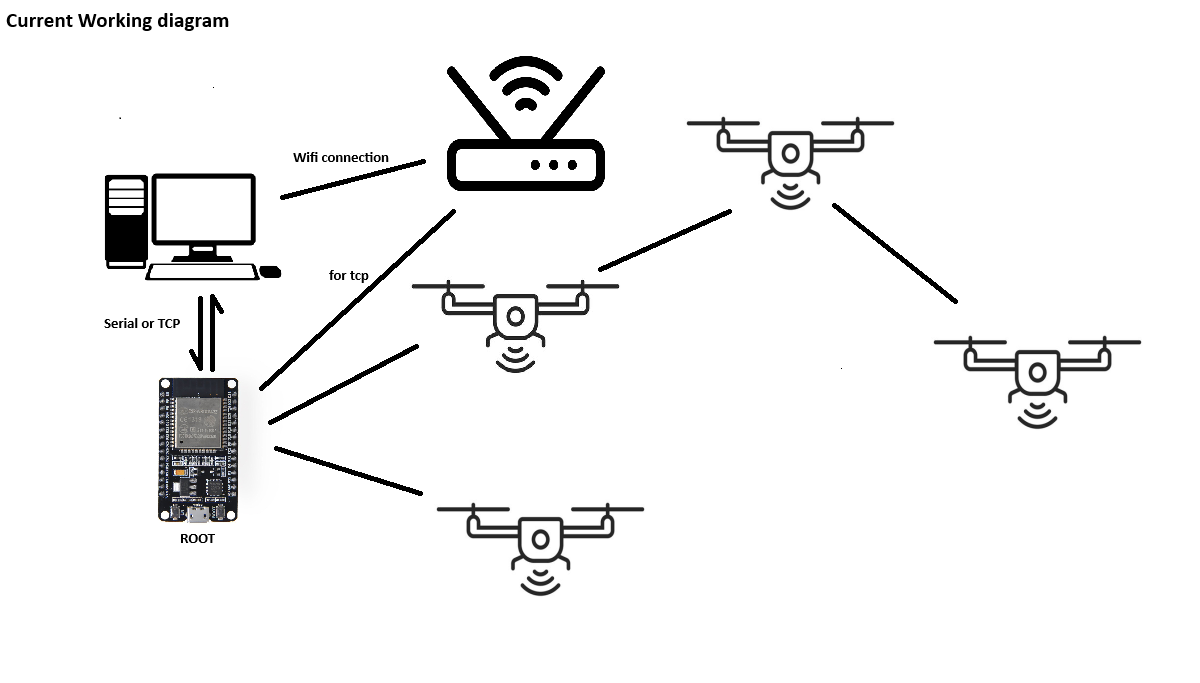
Concept

Implementation
I made a simple implementation of this concept using esp32 and esp-wifi-mesh library, as per the concept, the node 0 encodes and decodes data between mesh and host, the data are encoded and decoded in base64
I tested with my two available fc minipix and pixhawk 6c, and the system works*
Two fc’s with esp32

decoder esp32
mission planner

Problem
I believe there are much more room for improvement, but for now when connecting the node 0 sends all drones data with the mix, some times gcs stuck in loading parameters or loads one drone data not the other and when switching it reading data all over again,
For now to overcome this problem i need to power cycle the drone one after another or try plugging in and out node 0 multiple times to get all drone data with the parameters
This bottleneck in node 0 might be the problem that I am guessing, or it could be a bad code.
Tried something to solve?
I try to read the gcs data that is broadcasting so that i can create a scheduler that helps to connect drones orderly and relieves some bottleneck on the node 0. So the data from gcs i read in both hex and ascii, initially the data is random and then sends mission planner version, Afterwards this data is followed {a….b….c….d….e…(so on) …y… z} might be the parameter reading? Then steady length data stream, i observed this from node 1, but i couldn’t find any differentiating factor for reading particular drone data alone
I am out of options, any solution or suggestions would be helpful
Code
This is the code i using, its a arduino code using painless mesh library
remember to change node 0 ie router-base address in node code
node-v1.ino line 29