Hello, I have been trying to get an autonomous flight in for some time now using Mission Planners Waypoints. However, when putting the copter into Auto mode it takes off normally then a couple seconds after looking like it is going to fly its course it completely freaks out.
My hunch is a GPS issue but it doesnt seem like that since the status was good throughout the flight. I attached the log here:
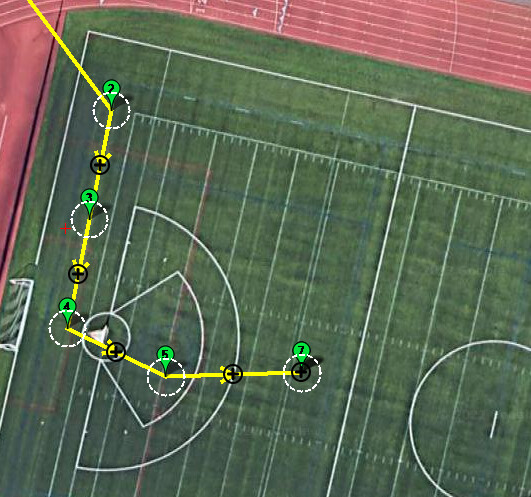
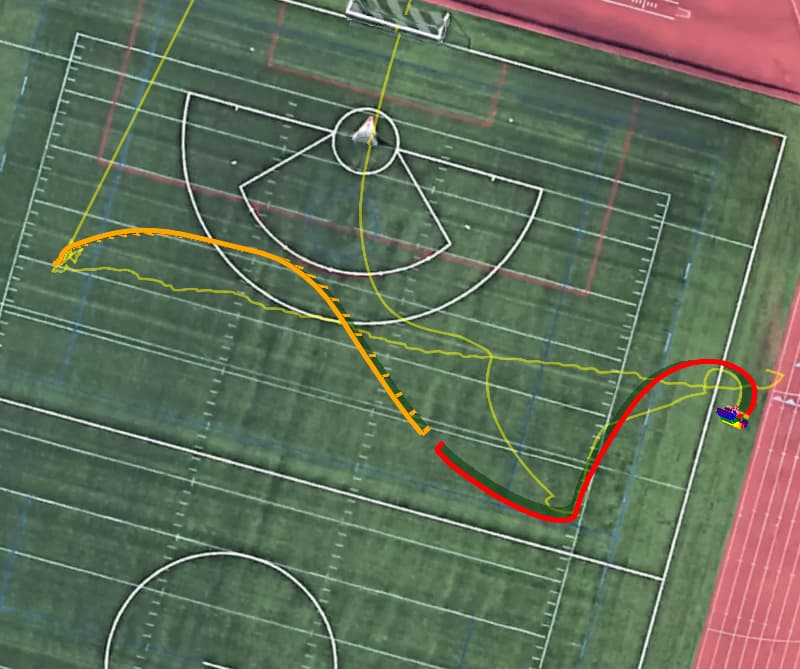
Any help would be much appreciated. Let me know if there is any other information I should be providing. There is a screenshot of my Mission plan and also of the KMZ from the flight log overlayed on Google Earth:
You’ve disabled most of the arming checks, and your battery voltage sags to 9V at one point during the flight which would imply it can’t provide enough current for your setup.
I’d suggest you start at the beginning of the setup guides and follow them carefully or you’re going to end up with an expensive crash…
I saw that in the messages. I guess I was just looking at the “GPS>status” in the logs. Not sure how to combat the glitches though. The GPS has a hard time getting a fix too (really shouldnt be happening especially now that I have taken it to a third place), I was thinking somehow it lost its fix mid-flight but I dont think I saw that anywhere in the logs.
It’s not keeping up with the data rate set either. Graph GPA>Delta. The rate is set to 200msec (5Hz) and it’s often at 400msec. Maybe time to replace the GPS unit. What is it? And what Flight Controller is this?
Thanks for this info. My current battery is 50C at 5200mAh I would have thought that would be enough to get the Quadcopter off the ground. Could be that the low voltage caused the GPS glitch??
@dkemxr I have a Navio2 flight controller and the GPS is in the link below (its gotta be some knock off is my guess)
I actually purchased the Pixhawk Cube about two weeks ago with a Here3 GPS. I may just replace this whole setup.