So, I am giving the target position and target velocity to set_position_target_local_ned. My aim is that drone should follow the vehicle.
Drone is doing what it is suppose to do. However, when I accelerate the speed of my moving vehicle, drone is lagging behind. It is following the vehicle but drone moves very slowly as compared to the vehicle speed. What can be the possible changes i can make ? I am already giving the drone velocity of my moving vehicle still it is slow when I accelerate.
| PositionTargetTypemask::POSITION_TARGET_TYPEMASK_AY_IGNORE
| PositionTargetTypemask::POSITION_TARGET_TYPEMASK_AZ_IGNORE
| PositionTargetTypemask::POSITION_TARGET_TYPEMASK_YAW_RATE_IGNORE;
let msg = MavMessage::common(MavCommon::SET_POSITION_TARGET_LOCAL_NED(
common::SET_POSITION_TARGET_LOCAL_NED_DATA {
time_boot_ms: 0,
x: pos.x as f32, //
y: pos.y as f32, //
z: pos.z as f32, //
vx: vel.x as f32,
vy: vel.y as f32,
vz: vel.z as f32,
afx: 0.0,
afy: 0.0,
afz: 0.0,
yaw: yaw as f32,
yaw_rate: 0.0,
type_mask,
target_system: 1,
target_component: 1,
coordinate_frame: common::MavFrame::MAV_FRAME_LOCAL_NED,
},
));
self.send_mavlink(msg).await?;
Ok(())
}
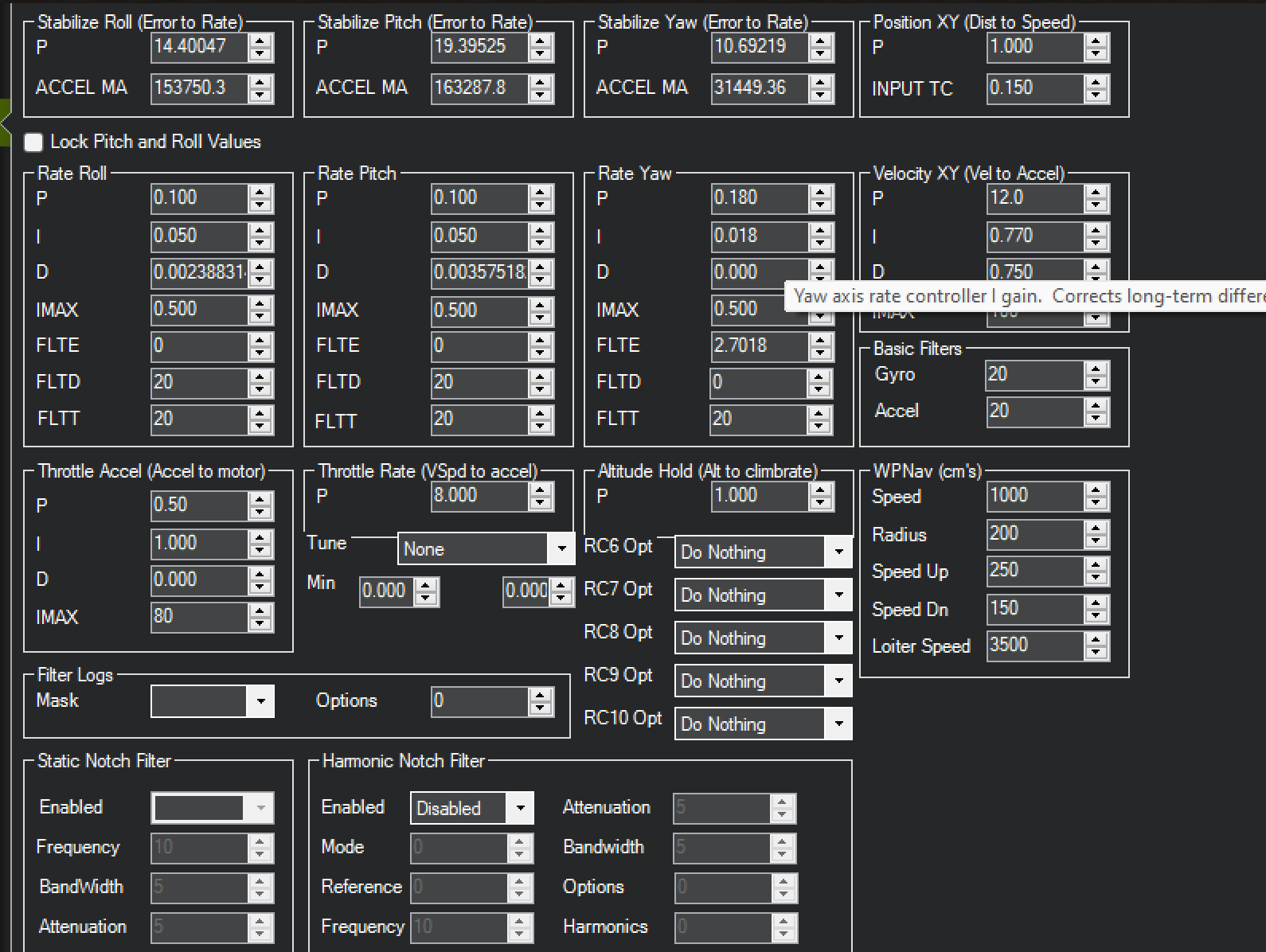
These are my parameters of basic tuning which I have attached.
Thank you very much.