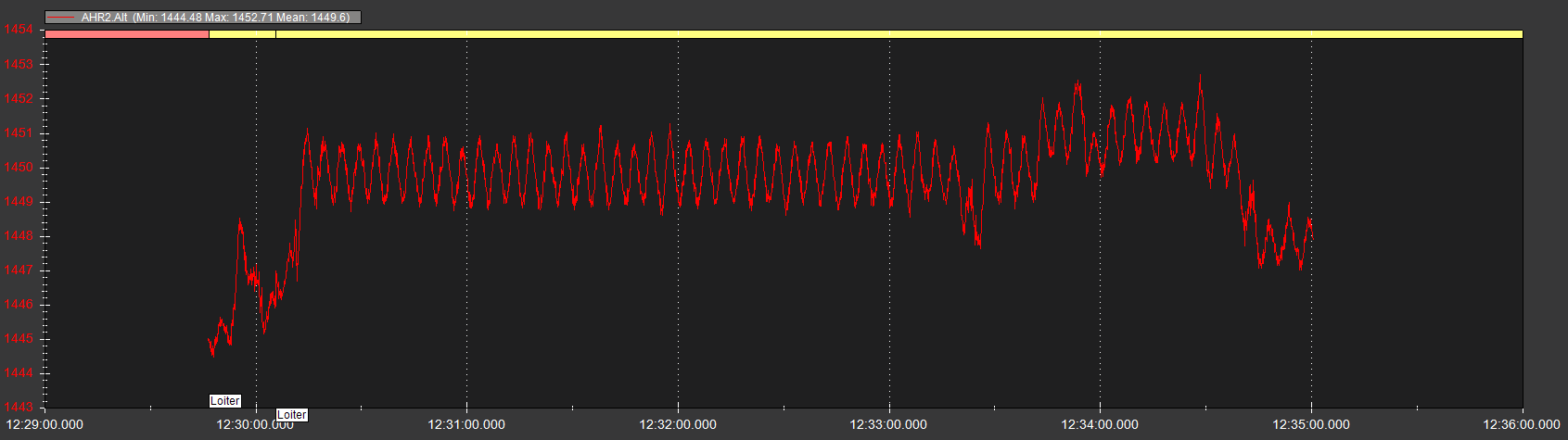
I just started noticing a vertical oscillation on a drone and am unsure what the cause is. All vibes seem to be pretty reasonable, and I’ve tried adjusting PSC_POSZ_P and PSC_VELZ terms but they don’t seem to be making any difference. Any thoughts on what else I could look at? Log is attached as well as a screenshot of the altitude. The drone flies fine, it’s just when I takeoff or return to a hover that it starts this steady state oscillation.
How did you come up with those Rate PID’s?
ATC_RAT_PIT_D,0.011
ATC_RAT_PIT_I,0.275
ATC_RAT_PIT_P,0.094
ATC_RAT_RLL_D,0.0045
ATC_RAT_RLL_I,0.156
ATC_RAT_RLL_P,0.095
And you don’t want EK2 active. Set those PSC parameters back to default. You probably only have to change these based on the Tuning guide and MOT_THST_HOVER
PSC_ACCZ_I
PSC_ACCZ_P
What size props on this Tri? Some of the initial tuning parameters don’t look set.
It’s running 18 inch props. I have since gone back to defaults for all PSC parameters. It’s weird because this drone has dozens of flight hours on it, and I haven’t noticed any oscillations of this magnitude until yesterday.
What other initial parameters do you see that aren’t set?
There is no precedent really for the ratio of P&I values you have. They are typically equal or in some particular cases I is a “bit” lower. The D-term for Pitch looks high.
The ones that are produced from the Initial Parameters Setup in Mission Planners Mandatory Hardware section. Run it and see.
I think I would do the following (somewhat of a reset):
Disable EK2
Update to latest Stable
Set the rate D=terms back to default and the P&I terms to 0.1
Configure as per the Initial Setup Parameters as mentioned.
INS_ACCEL_FILTER to 10Hz
Setup to configure the Dynamic Notch Filter:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Configure the Dynamic Filter as per the Wiki. Either Throttle based or FFT.
Run Auto Tune.