During flight test, using 4.3 version we observed that the drone height is reduced when giving pitch forward and vice versa. we have done flight test in Loiter mode. Please help me regarding this issue.
The flight log have been attached in provided link.
Flight controller: Cube Orange
`
Hi @shivasai_engineering
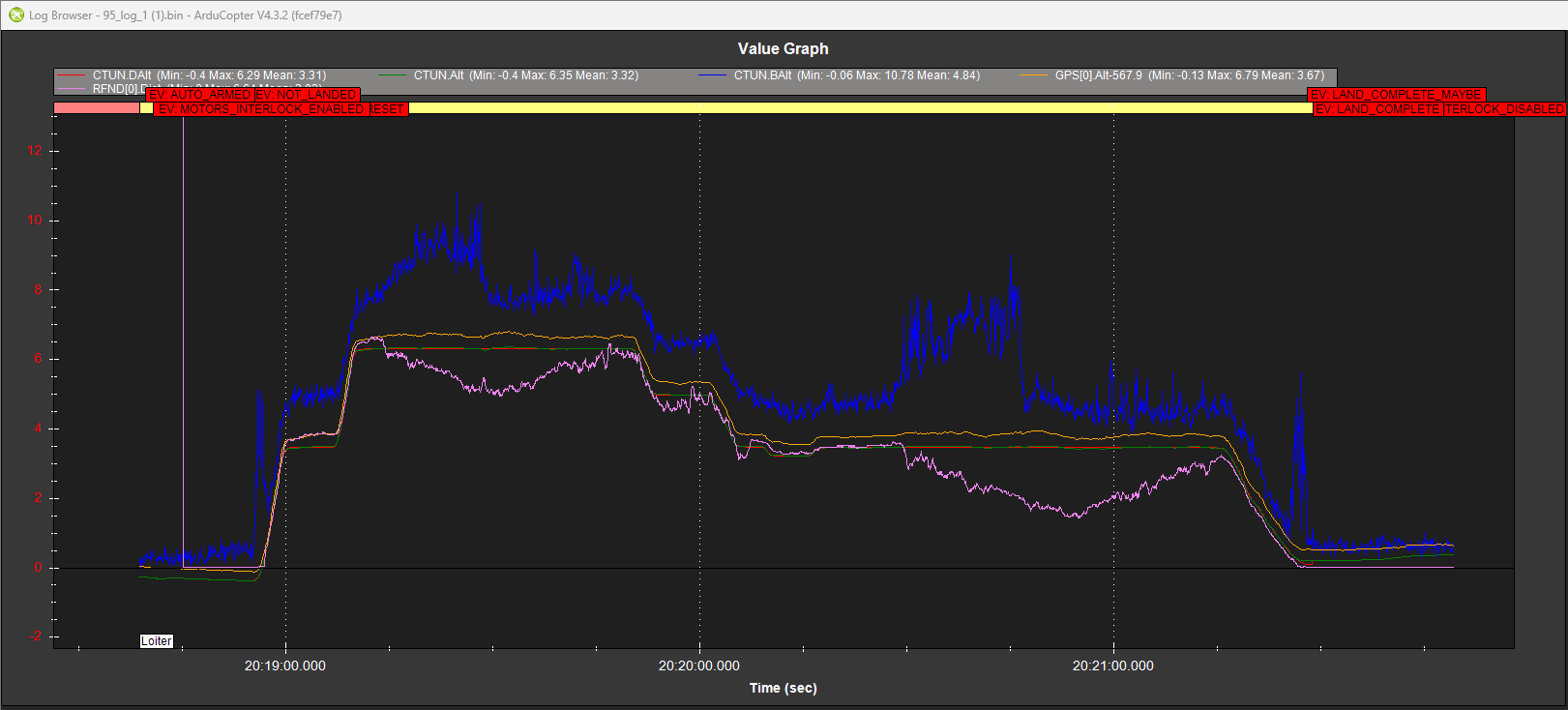
I think you have baro pressure changes due to airspeed. You can see this in the following figure:
But it looks like you are using GPS as the primary height reference. The GPS thinks you are maintaining altitude pretty well.
I can also see that your lidar altitude is also consistent over the same ground.
Are you sure that the aircraft is changing altitude and not just the slope of the ground?
Thank you for your response sir.
Yes we are using GPS as the primary height Reference. yes we are pretty sure that aircraft is not changing altitude with slope of ground.
Also wanted know how much variation is accepted for baro pressure changes. suggest any solution for the issue or any changing of parameter.
Do you want the aircraft to maintain the same altitude or the same height above the ground?
Currently it is maintaining a constant altitude but because the ground is not flat the height above the ground is changing.
I do need the aircraft to hover at constant height the topography is not the reason for the change in altitude of the aircraft as mentioned above.
please look into the issue and provide a feasible solution.
Do you want to:
- Maintain a constant height above your take off location?
- Maintain a constant height above the ground below the aircraft?
The aircraft is currently maintaining a constant altitude above the take-off location as can be seen in the log above.
I want a constant height above the ground not from takeoff location.
Ok, then you want Terrain Following for auto modes (Auto, Guided, etc.).
https://ardupilot.org/copter/docs/terrain-following.html
And Surface Tracking for manual modes (AltHold, Loiter and PosHold):
https://ardupilot.org/copter/docs/terrain-following-manual-modes.html
The wiki pages above should help you get started.