Karthik this side. We’ve done a mission few days before posting this. In that mission our drone got automatically reduced from it’s altitude of 20 meters to 8 meter and went to crash above a tree.
Want to know all possible reasons for having issues like this. Our drone set-up is a Quad copter with Cube orange flight controller. We are using T-motors MN2212 920KV motor, Simonk 2-3s 30Amps ESC and 9 inch propellers with 12000mah 3S Li-ion batteries.
Here in below I attached the flight log for your reference. If you need any detail from my end please let me know, I’m here to share them. Thanks in advance for your valuable inputs
battery should probably be 4S at least since it is Li-Ion
Simonk ESCs need to go in a museum somewhere - yes they worked well in the “old days” but now any ESCs labelled as Simonk are always old cheap hardware and there are much better modern alternatives
I dont know about your frame, but genuine T-Motors can be expensive and so are batteries, so dont take chances on parts that will not work properly
What is the take off weight?
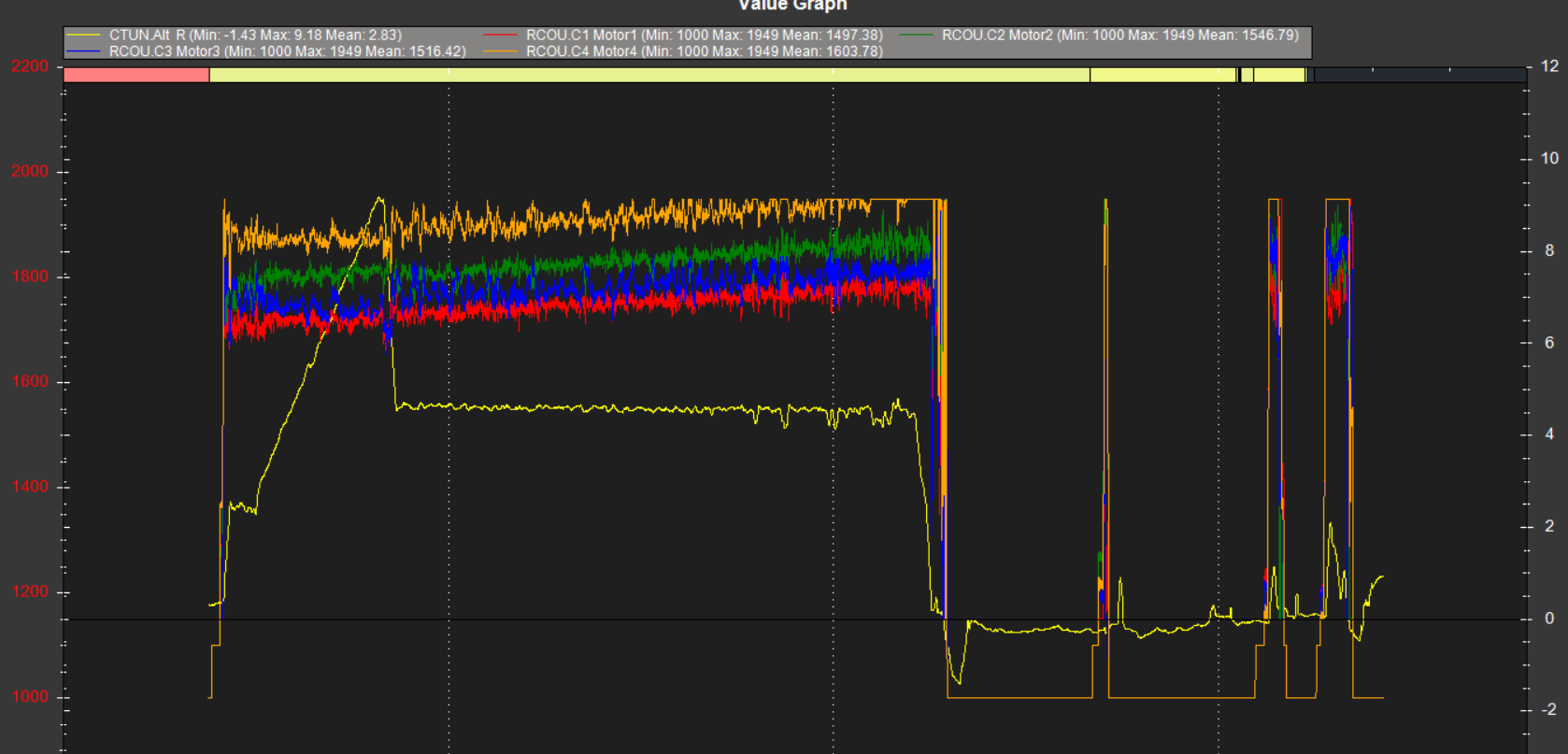
Looking at the log:
Attitude oscillations
Motor 4 is at maximum and the others are very near to maximum
Do test flights in Stabilise and AltHold until you have enough stability to try Loiter
You will definitely need a 4S Li-Ion battery maybe with 10inch props, or even a 4S Lipo with 9inch props which is what the motors are rated for.
You need to set all the battery failsafe values and actions.
Here I attached the photo of our frame please check it. And Take of weight of drone is 1.74 kg
I’ve already done with battery failsafe actions. but drone have not reached that voltage level. before that voltage level it started for landing by it self. what might be the reasons.
While doing the mission it showed me potential thrust loss (4). as you mentioned motor 4 was at it’s maximum. what all reasons for making potential thrust loss problems.
It’s landing because motors are at maximum and the flight controller is trying to maintain stability, but can only do so by reducing some motor outputs.
As I said you need a 4S Lipo, or at least a 4S Li-Ion battery (maybe 5S Li-Ion)
The battery failsafe voltages definitely are not set, you should:
connect to MissionPlanner / Setup /Mandatory / Initial Parameters
Enter your prop size and battery cell count, select Li-Ion checmistry
Select “Suggested settings” and click Calculate and accept everything it offers
Thank you all for your support and commands. All of your points are noted we will rework and let you keep updated…!
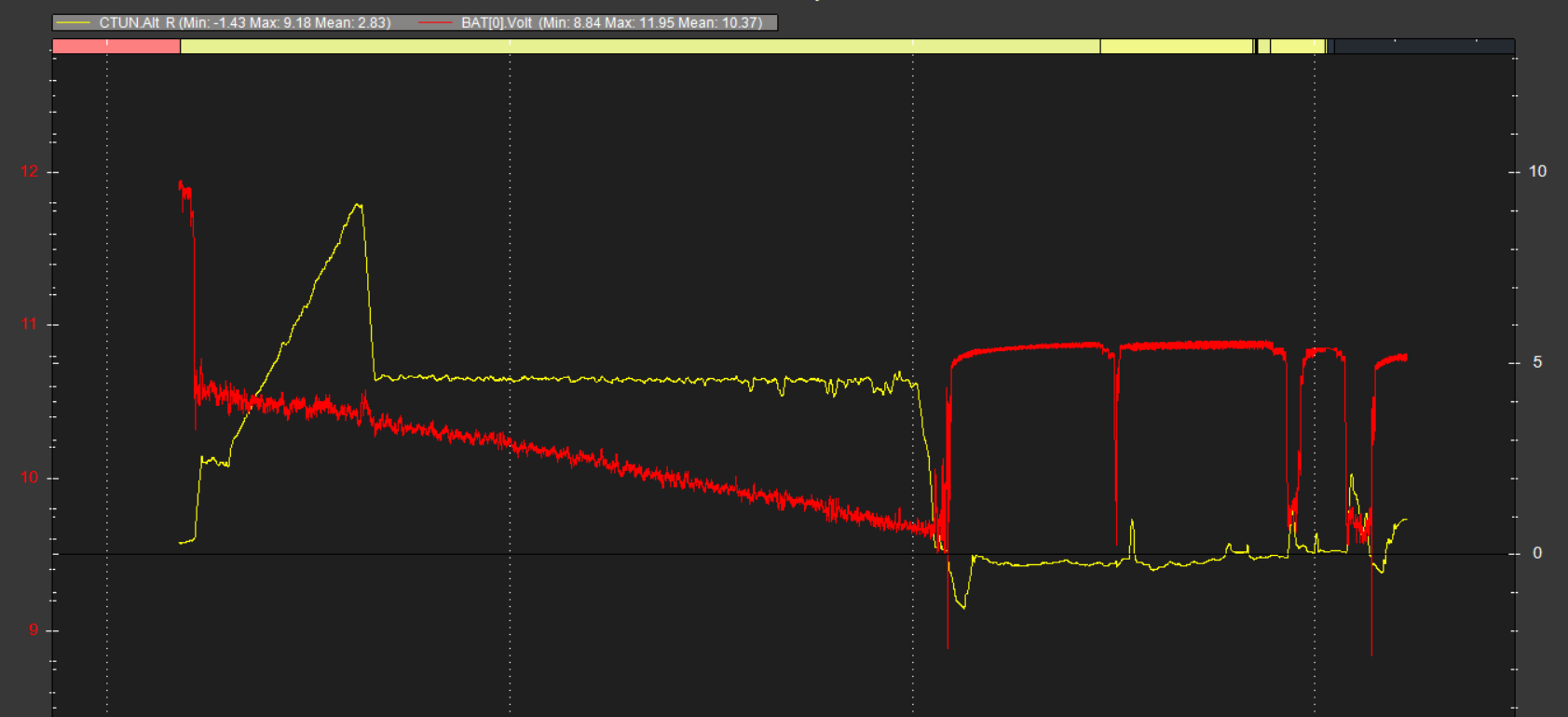
We have tested the same drone with Hovering test but over there also drone is getting down by it self. Please check the flight log and give your inputs.
Thanks in advance for your valuable time and commands.
Same as before - you have just enough power to get airborne with that battery - it goes flat very quick and then you are coming down.
You still dont have the voltage levels and failsafe actions set.
The battery is going to near catastrophic level and it will be losing capacity and near death.
After the first time the battery is depleted it no longer has enough capacity to get off the ground again.
Even at the start of the flight when the battery is working somewhat, you dont have enough thrust to weight ratio to handle any disturbances (if there were any) and as the battery voltage goes down your motors reach their absolute maximum output.
You will need a 4S Lipo and a good charger.
By the way, if you get failsafes triggering, like low battery voltage, the solution is not to disable the failsafe but to fix the voltage issue. There has been many a drone crashed and battery killed by not having the voltage failsafes set correctly.
Test flights are where you need these features just as much or more than in any other scenario.