I am newbie in Drone word, please help understand what is going on.
So I created drone based on pixhawk, drone seems can keep its height if I dont move it.
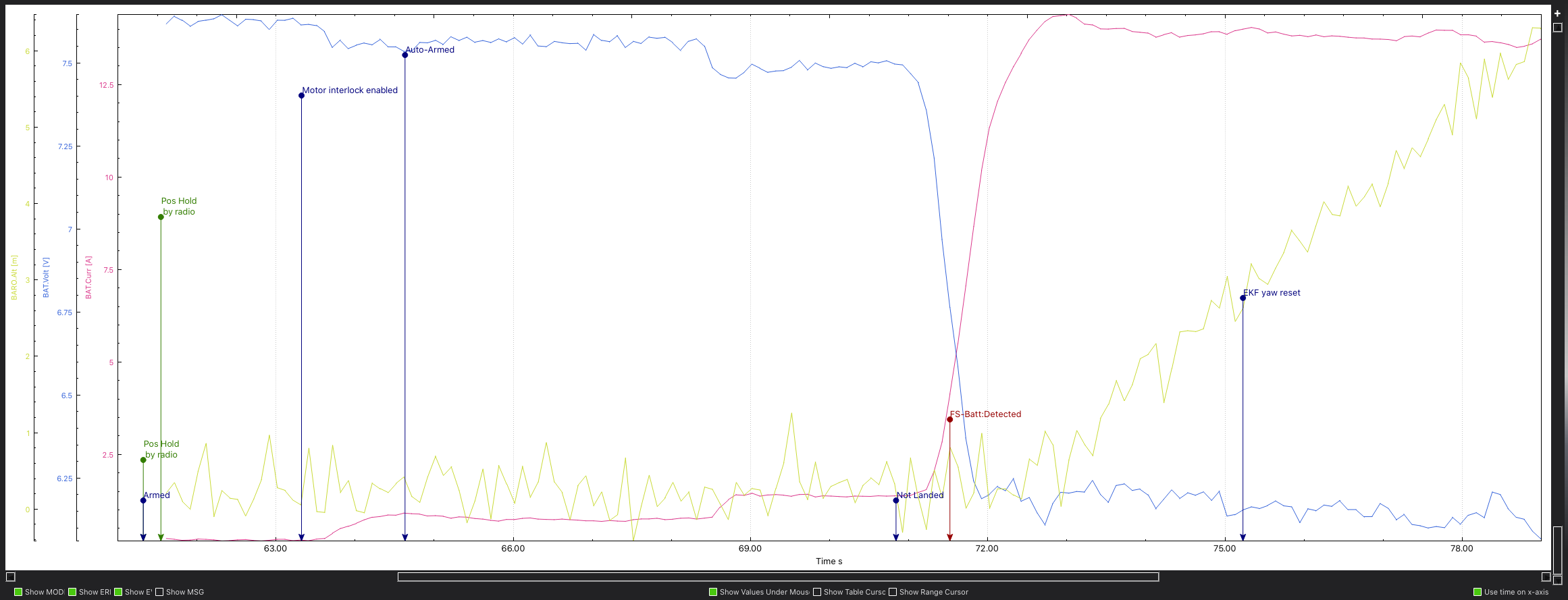
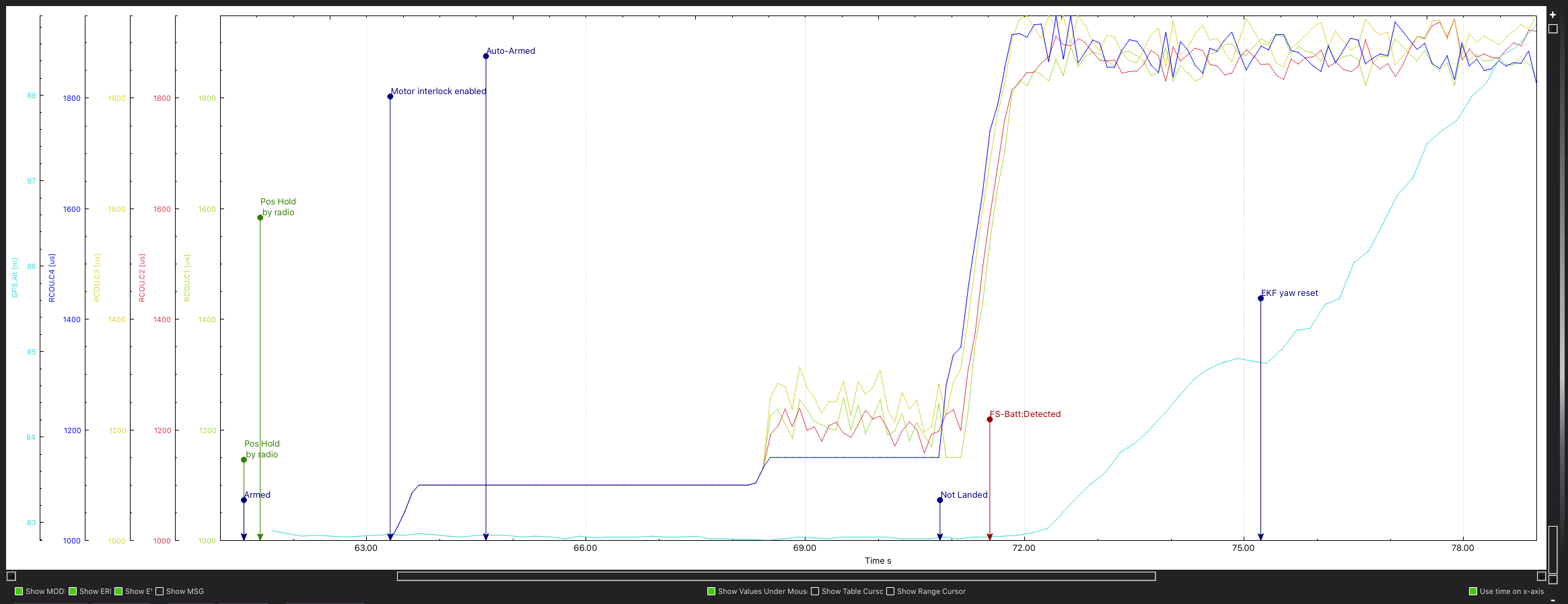
But when I move the drone left or right it starts to go down. Please see here:
Even if I do trottle, still drone does not going up.
Can someone please help understand what is going on.
Test: Event/Failsafe = FAIL - ERR found: FS_BATT
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - 'THR_MIN' not found
Are these dangerous?
May be I should study what these fields mean, but if someone can explain that would save lots of time for me~
Full analyse result:
Log File C:\Users\usr\AppData\Local\Temp\tmpC13D.tmp.log
Size (kb) 472.658203125
No of lines 6421
Duration 0:00:15
Vehicletype ArduCopter
Firmware Version V3.6.10
Firmware Hash 1c04a91e
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (1.51%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: FS_BATT
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.38, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1339, 1344, 1313, 1373]
Average motor output = 1342
Difference between min and max motor averages = 60
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Firs of all thank you much for your time.
I am using 2200mAh:35C Series battery. Just cheapest one~
Can you please teach me how you generate these waves please? I tried to generate such waves using Mission planner “Review Log”, but could not.
I would be very happy if you can provide some materials about how to fix my battery issue.
What they actually said was the Motors are 2S-3S.
They don’t state anywhere in the add that you need a 3S battery, which they should.
The 53gm is per motor.
You need a 3S battery.
This is a common configuration 920Kv motors w/10” props needs at least a 3S battery.