I have a S500 that I purchased second hand for pretty cheap. It had a APM 2.8 on it, but I changed it to a Pixhawk 2.4.8 recently. I never really flew it with the APM on (but it did get airborne and lazily hover), but it wasn’t tuned great and I didn’t spend much time on worrying about it as I knew I was putting a different AP on it anyways. Now, I’ve had two flip overs when the throttle is brought up to about a quarter. It feels a little to sporty for me, and I will modify this as I go, but the issue is that it flips over… and it’s always to the right.
2212- KV920 (look like ReadySky)
30A ESC’s Hobbypower
Pixhawk 2.4.8
ArduCopter V4.0.7 (0bb18a15)
ChibiOS: d4fce84e
fmuv3 003E002C 3036510D 36373734
Master Airscrew 9 X 4.5 Props
4S 2300 mAh 45C
Here’s where I am now
Calibrated the ESC’s (3X’s now)
Calibrated RC on MP and on my Taranis QX7S
Followed the recommended initial tuning
Props and motors are all turning in the right direction
My motors were initially in the wrong order, but they’re now in the proper sequence on the motor test page. The drone may flip over to the left now, as the it appears motor 3 is really struggling.
I don’t feeling like dinging more props, so I’m not going to attempt a take off until have some more info on what I’m doing wrong.
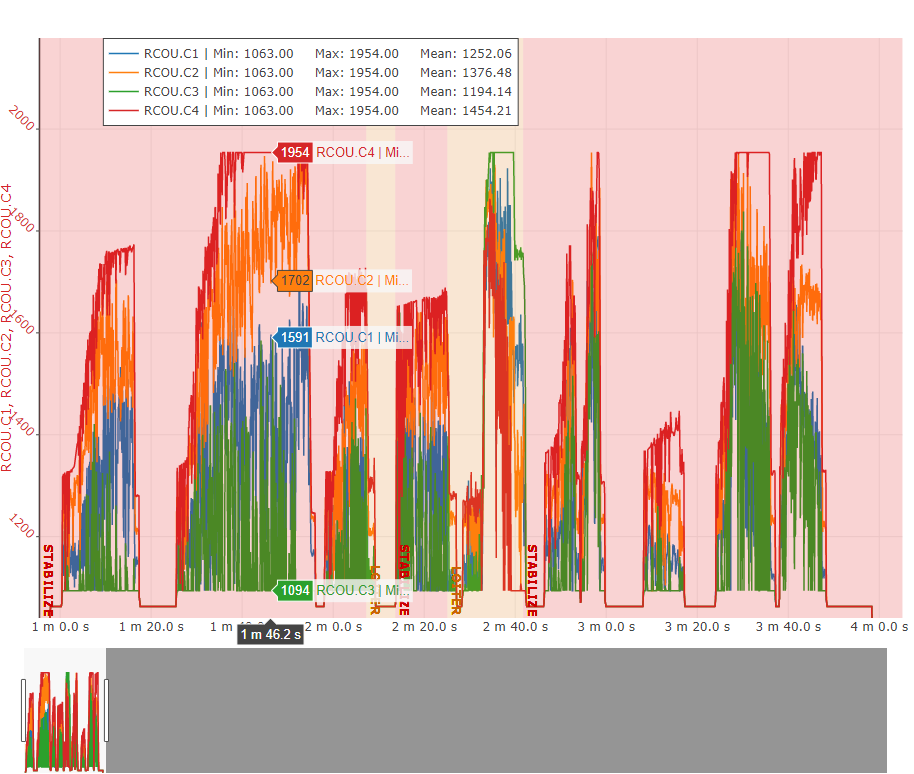
I’ve anchored the drone down and completed some power tests. I’m far from an expert but I see large difference is motor outputs (at least I think I do).
Am I dealing with hardware issues? Tuning issues? User error? I realize these are cheap parts, but it’s the journey. It appears a similar question has been asked, but it’s either expired or its in a private group. I can’t gather any info on it.
So I pondered overnight and decided just to do another flight with the motor order corrected. World of difference. Need a bit of constant right aileron and some finer tuning for sure, but night and day compared to the previous flights.
Do autotrim and calibrate the compass. After calibration try to takeoff in PosHold mode, it should automatically hold position, but make sure you have 3d lock before you takeoff. If that works try to engage RTL in flight, make sure to set decent rtl altitude. And set up failsafe as soon as possible!
Thanks Moksh. I’ve discovered this hick up in my planning as I’m trying to do the auto tune. Not enough battery life to do the all axis auto tune. I’m going to change the param to do each axis separately while I look for a larger capacity battery. I only had a 5" fpv drone before this, so my battery inventory is weak.
If its flipping first things I check are the channel ordering on the RC match the flight controller setup, is the motors/esc wired right (on mine just switching 2 of the 3 outputs of the esc results in the motor operating in the other direction). Or you have the esc inputs plugged into the controller in the wrong order, I’m thinking are the most likely culprits. Or I’ve even done silly things like put the wrong style prop on.
Yeah, I don’t know how on the new firmwares out there, but on mine, one of the channels (pitch) should be reversed on the controller, if so, then land it and reverse it there on the field, no need for a computer, as it is done using your transmitter.
Also just want to say to get a good battery enough for autotune, especially on a hexacopter! Search for one, I never used a hexa, but by guessing I would say 3S is not enough, if all of your components support, go for 4S @CofG
Strap down testing it totally useless. All it does is drive the PID controllers nuts. If its flipping on take off, either the motor order is wrong, the flight controller is installed backwards/missoriented, or there is a channel in the radio that needs to be reversed.