During autotune the drone just falls from the sky. Iam using ● kakuteh7 FC ● Bheli_32 4 in 1 esc ● 500kv motor 18inch props
firmwareversion 4.3.6 ( kakuteh7 bdshot). I have no idea why drone drops off all off a sudden. Is it an esc issue ? please help @xfacta . Log link attached below
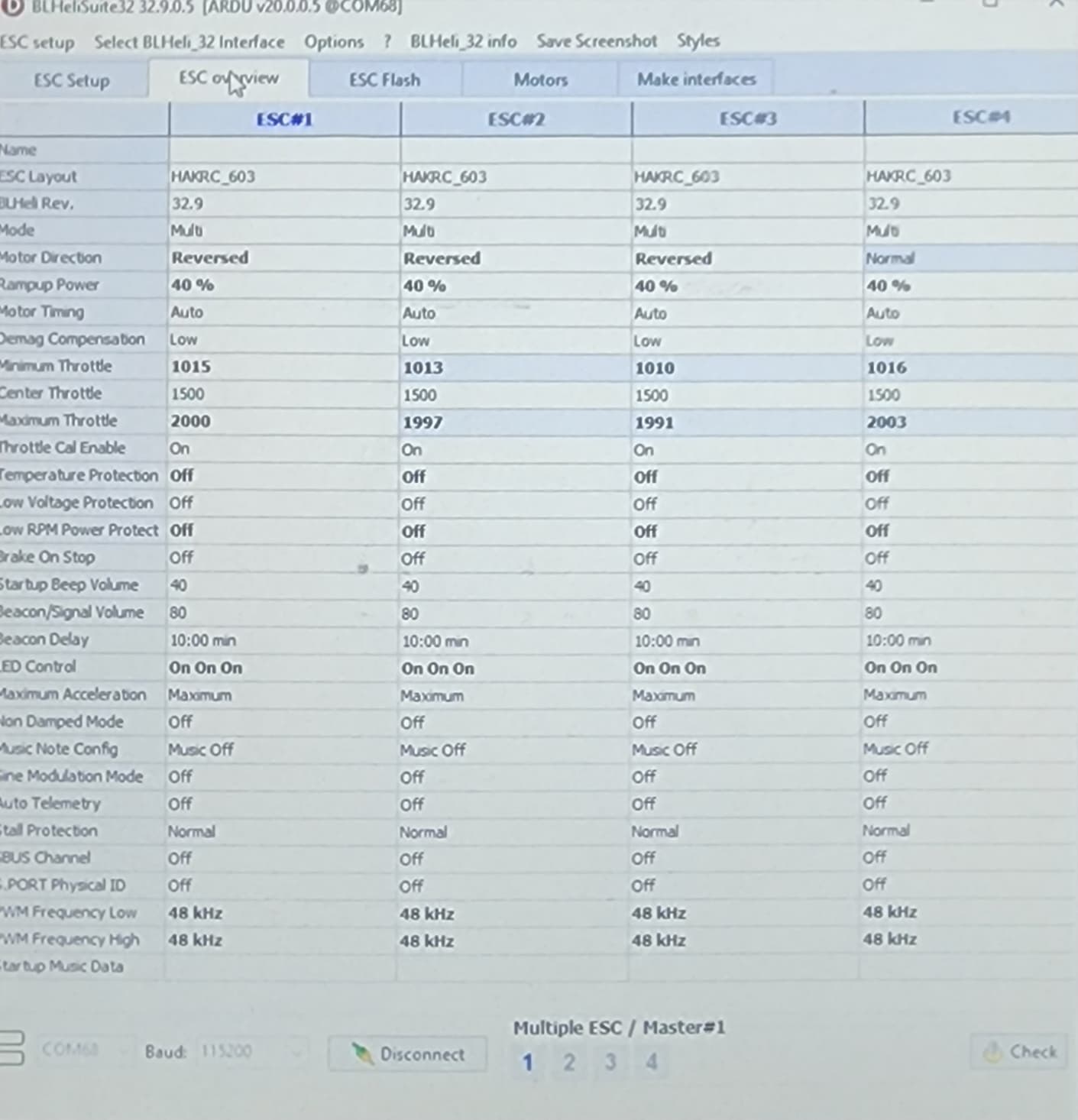
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Motor Timing = Auto
Temperature Protection = 90 → see below
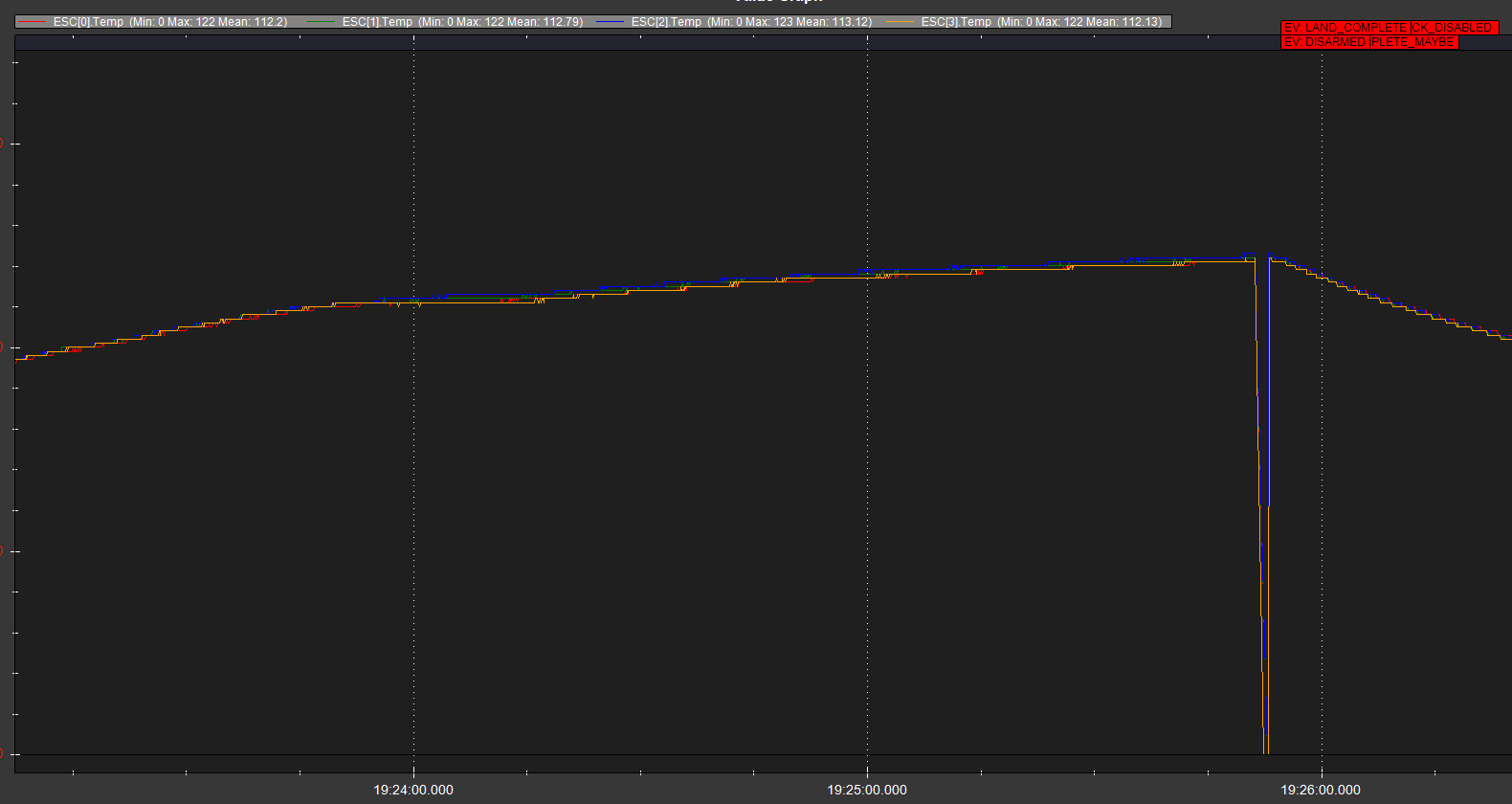
I would say the ESCs’ MCU has overheated
Temperature rises to 120 then all ESC data stops for about 1.5 seconds - this is when attitude control is lost. There doesnt appear to be an issue with battery voltage or connections to ESC or motors.
Normally I would say 90°C is more than high enough of a temperature limit, since the MCU stops responding at about 120°C - as we can now see demonstrated.
The fact your ESC has blasted past 90 and on to 120 says there is probably an issue with airflow.
Also we shouldnt be afraid of setting the temperature protection to 90 (or maybe 100) as BLHELI should gradually reduce motor output above that temperature. You would see the copter slowly losing altitude as it tried to maintain stability.
From the BLHELI documentation
The ESC measures temperature within the MCU and limits motor power if the temperature is
too high. Motor power is limited over a range:
If the temperature is above the threshold, motor power begins to be limited.
If the temperature is above the threshold plus approximately 15°C, motor power is limited
to 25%. Motor power is not limited below 25%.
So we have 90+15 °C to limit output by 25% - still under the 120°C where the MCU shuts off or resets.
One of the things evident here is the value of the ESC data!
Without it we would be chasing shadows, not really knowing what happened.
Unless it’s a ESC with an F4 processor w/o an external temperature sensor. But in that case temperature protection will/should be turned off by default.
Is air flow a issue on a well designed craft? For example if motors run hot it could be a coil winding dent from a long screw. If it’s a esc issue then something is really messed up with Dshot. the smell test is a good idea and touching the motors after a short flight.
Even today it happened…position hold it flew good for 3min thn all of a sudden motors just shut down .
I kept low RPM protection OFF , Low temperature protection OFF , motor timing was set to Auto , i had changed pwm frequency low and high to 48khz …my esc settings i dought the minimum throttle and maximum throttle varies shouldn’t they be same ?