Hi everyone,
I have some trouble using vicon system as external GPS.
I have followed the instruction here (https://ardupilot.org/copter/docs/common-vicon-for-nongps-navigation.html). The problem is that the drone drifted while in PosHold mode. I fixed this by adding a optical flow, but I still really want to flight without optical flow. Anyone know about this issue? Do I need to do other things not mentioned in the instruction?
Thanks!
What hardware? what FW versions? Can you post a dataflash log showing the drift?
My hardware is CUAV5+ using copter 4.05. Sorry for now I don’t have the drift data log but I will try to provide it asap.
Have you successful in using vicon as mav gps?
Take a look at:
and help us out.
1 Like
Sorry for a dumb question, but do you use vicon as gps_type=14 (mav gps)?
I don’t. But there are others that do.
Thanks! I will check my drone as yours suggestions
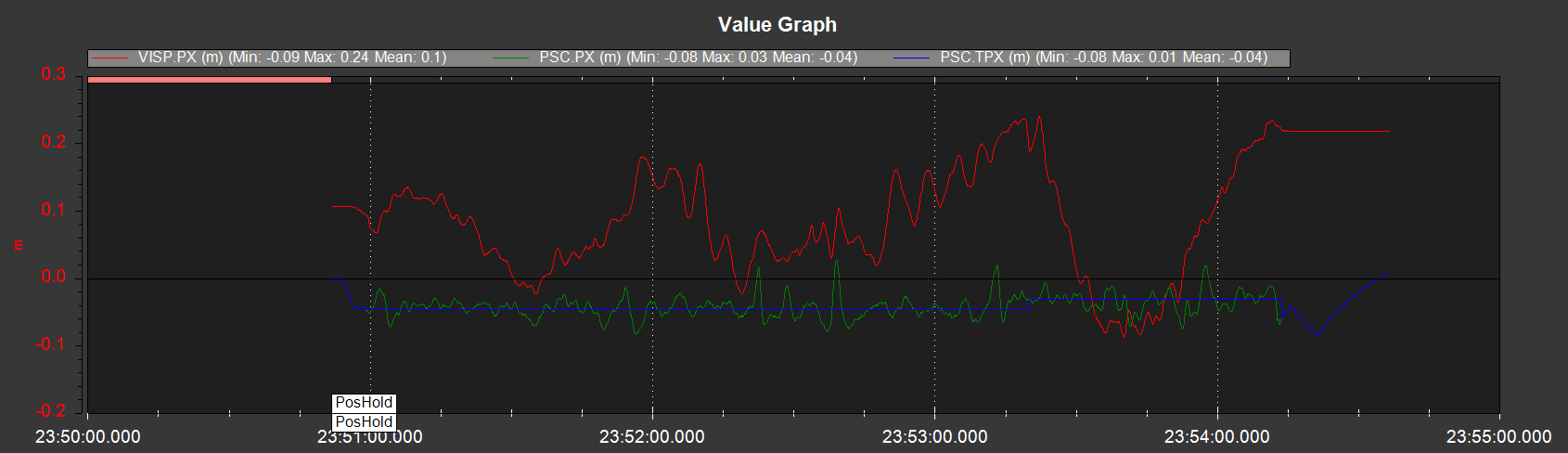
Today I have made some tests, here is the 1 log file
I observed that: In the Position control data, the PX seem to not oscillate much and perform a good poshold but the data in VISP is difference, do you know about this problem? Is that the problem come from vicon setting or it come from my control param?
Thanks