Hi, I would like to ask for help analyzing why our quadcopter crashed. The specs of the quadcopter are as follows:
Flight controller: The Cube Orange
Frame: ZD550 carbon fiber
ESC: Readytosky 40A 4-6S Opto
Motors: 5010-750 KV
Propellers: 1245 plastic propellers
Battery: 6S LiPo
BIN file:
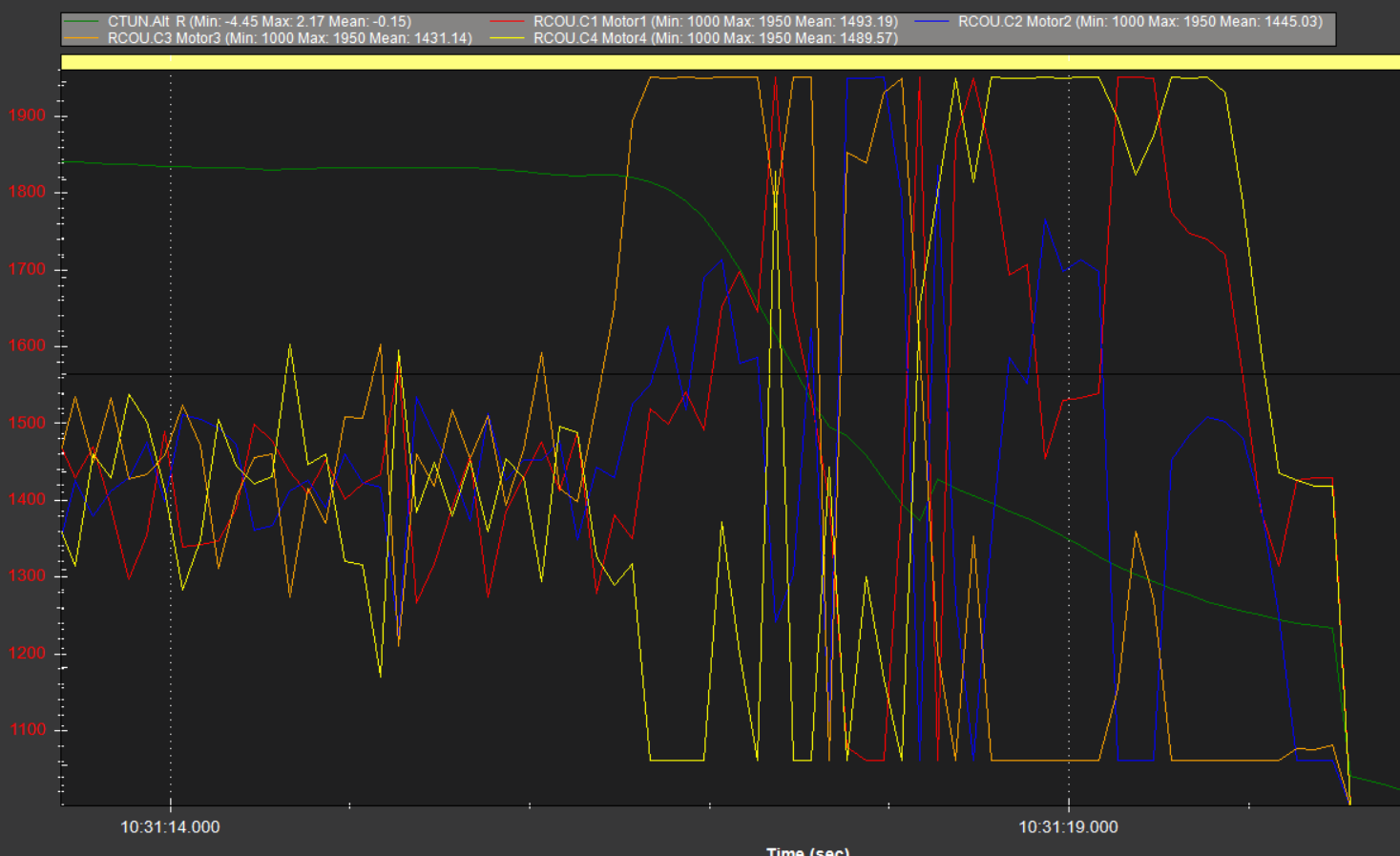
The drone is set up with the Herelink V1.1 system with a Siyi A8 Camera (camera is powered by a separate 4S LiPo). It was flying okay until the latter part of the log file where it was still in Loiter mode, and then suddenly it made a large roll/pitch causing it to crash. It is as if it just fell off. Is the cause because of the motors or due to a lack of calibration prior to the flight?
Those ESCs are old tech and quite cheap - they might work forever or they might be the problem.
To load-test the motors and ESCs you move the props around one position (to the next motor) and flip the props over. They will now push down.
Use MissionPlanner motor test to run the motors for some time
Would there be a specific behavior that I should look out for while doing this test? Such as reaching a specific number of minutes where the motor and propellers are working properly? Or should I see the problem motor/ESC suddenly stopping?