https://drive.google.com/file/d/19H--mIciQ1SOH2gQXxrqJ2iWJ4csg1kq/view?usp=sharing
Drone rose to 42 meters and crashed when throttle stick was all the way down.
At some point when it was ascending one of the props popped off.
From what I saw at your parameters at the log, you didn’t follow the steps for tuning like stated here:
https://ardupilot.org/copter/docs/common-tuning.html
An untuned drone can lead to disaster. Take a look at most of the crash reports at this forum, most of them caused by neglecting the tuning process.
Thank you for the answer. It is true i didn’t fine tune yet. I was planning to do autotune next morning.
It is also true an untuned drone may lead to disaster but i can’t quite understand how it can cause for drone to ascend to 42meters from few meters while my throttle stick is at bottom.
Do you have any idea why the ascent happened?
As i am going through other drone crash reports where there were no control over altitude i understood it would be better for me to do the first testing in stabilize mode.
But still no idea what caused the 40meters of ascent with throttle being down. Your insights are really valuable for me.
Z ekseninde yüksek titreşim görünüyor. Birde en ufak bir parametre değiştirmemişsin ve en azından Stabilize mod ile test yapman gerekirdi. Autotune yapmadan önce manuel olarak ayarları epey miktar iyileştirmen gerekiyor.
There are vibrations in Z axis. You had not changed any parameter and you must fly at stabilize mode for test at least. before autotune also you must tune parameters serious amounts.
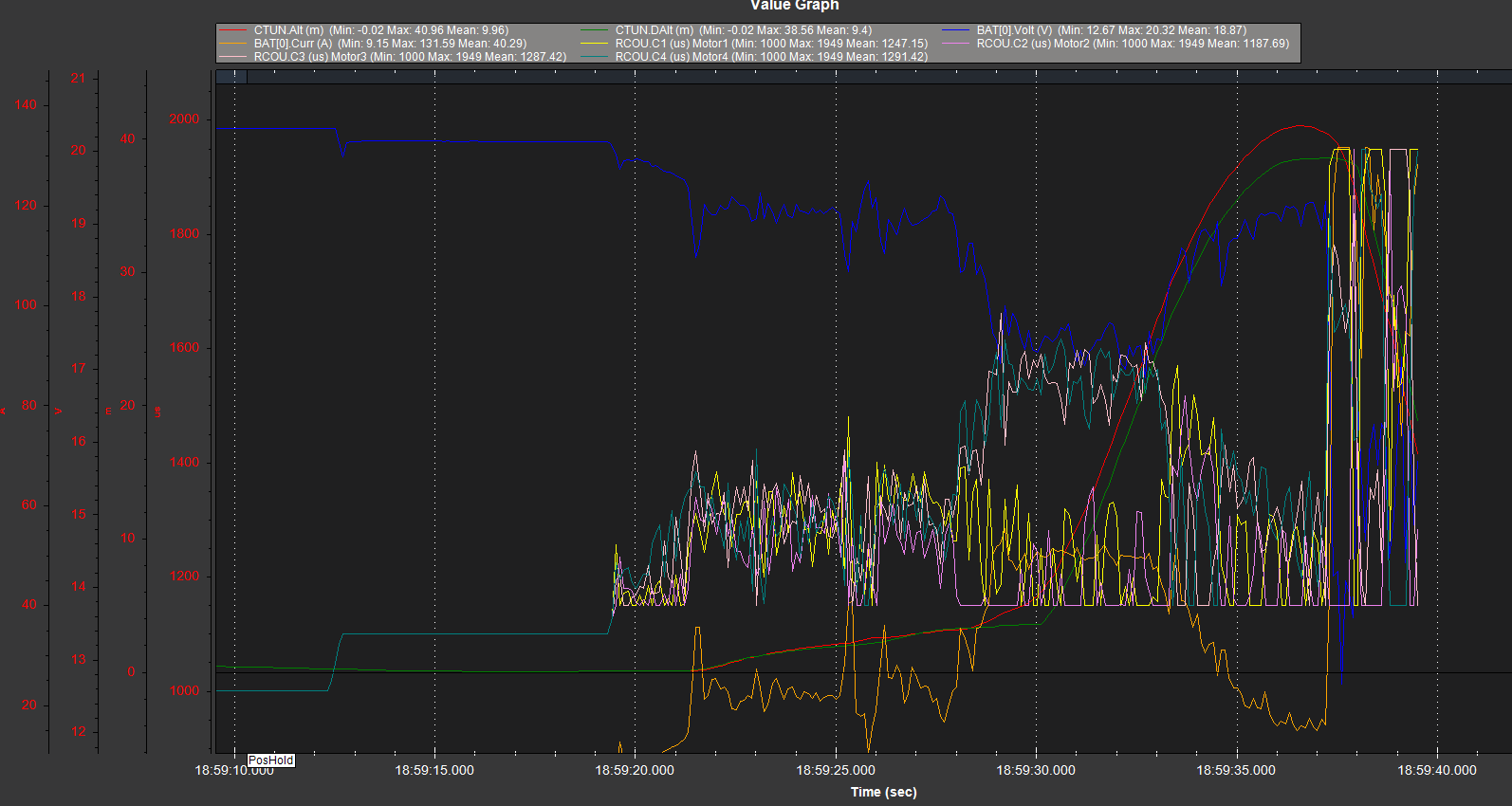
There’s two notable things in this log.
- it ends abruptly like battery power is lost, or at least supply to the flight controller
- the motors are mostly on minimum RPM and trying to stabilise the craft, thus causing the rise in altitude despite the throttle input.
Fit smaller props, maybe add some dummy payload.
Check electrical connections.
EDIT: there could be something odd going on with your props too, particularly since you mention one came off. There could have also been motor mounts or arms twisted in flight
2 Likes
Please show a photo of your installation. Which motors, esc, props and battery are you using.
BR
Harald
Thank you for valuable insight.
I plan to fly with extra payload when everything is set, i ll try to use a dummy payload in the meanwhile.
I will use the initial parameter calculator.
Also you are right with the twist at motor mounts or arms. We built this drone with friends and our mechanist said it was fine when we were able to twist the motor mounts with our hands…
I have no idea why current hit 0, do you have any guess? Battery is directly connected to Power Brick(comes with cube orange) and it should be the one who measures the current.
After using initial parameter calculator, adding dummy payload and fixing our motor mounts do you think we would face with undesired altitude climb?
Motor: Sunnysky X3520 720kv
Props: 14x7
ESC: Hobbywing Skywalker ESC 80A
PBD: Matek Xclass Pdb Fchub-12s
FC: Cube Orange with Arducopter 4.2.1
Frame: Quadrotor
Pic:

Try to get the ESCs mounted inboard and then you can run the motor wires up the middle of the arms.
In this case neater is actually better, since prop wash will be making more vibrations than necessary while those ESCs, cable ties and wires are all strapped the the outside of the arms.
1 Like
We have done the alll the things you mentioned.
Updated the params
Added dummy payload.
Changed the design, now we almost have perfect center of gravity ESCs are inside, cables running through arms.
eternal_iha.param (17.1 KB)

did you made flight video?