I recently encountered a serious issue with my drone, and I’m hoping someone can provide some insights or guidance.
During a recent flight using only my RC controller, my drone suddenly lost control and began spiraling down uncontrollably until it eventually crashed. I’m at a loss as to what might have caused this issue, and I’m seeking any advice or troubleshooting tips that could help me pinpoint and resolve the problem.
Here are some additional details:
I was flying in an open area with no apparent interference.
The drone had enough battery power, and there were no warning signals before the incident.
The RC controller was well within range, and I’ve had successful flights with it before.
If anyone has experienced a similar situation or has expertise in drone troubleshooting, I would greatly appreciate your input. It’s disheartening to see my drone in this condition, and I want to prevent such incidents in the future.
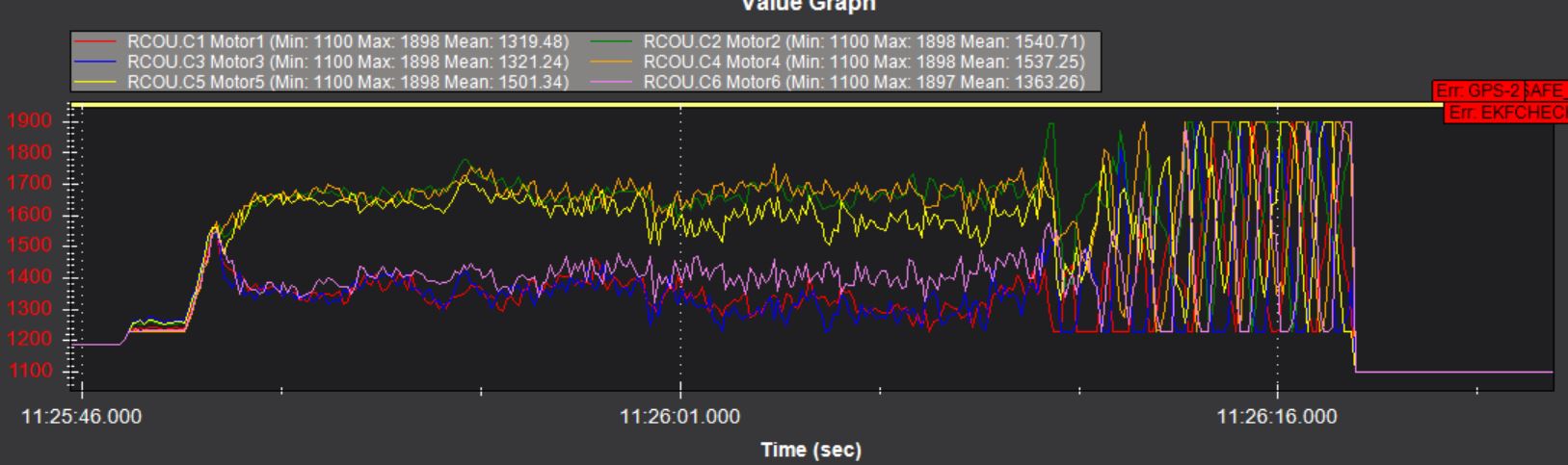
This craft has a very bad mechanical Yaw bias. Twisted motor mounts or arms are usually responsible. As a result the CCW motors are being commanded higher and then Motor 2 loses thrust. At that point the battery voltage is down to ~17V also. Down it goes.
Hi Dave, thank you a lot for taking the time to review my flight log.
The twisted motor mounts was an issue in the past and just before this flight I double checked and tight every single one.
I thought of the battery as a potential issue but the two 6 cell 5000 mAh batteries were around 25 V before take off and after the crash they were 24.2 V. I do acknowledge that the battery pair I used is not the most reliable I got.
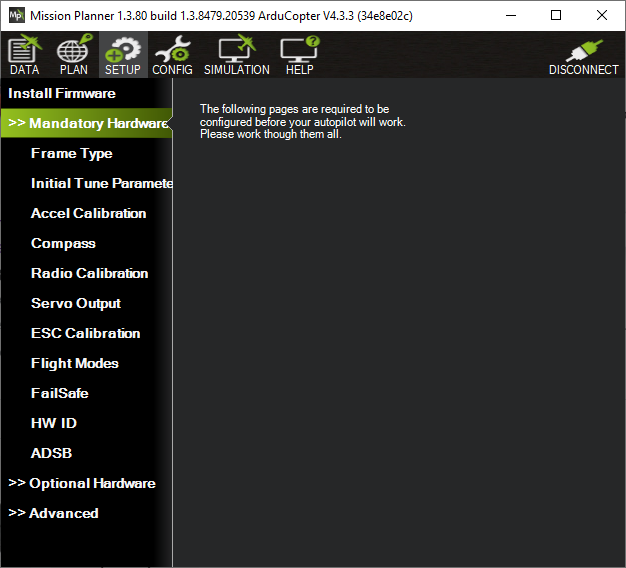
As for the parameters, aside from setting up precision landing and a few gripping mechanisms I try to stick with the default mandatory Hardware setup like the ones on this figure:
This wasn’t a result of tuning. You need to fix the yaw bias as 3 of the motors are running harder than the others. It’s particularly bad on this craft.
Tuning should be completed on all craft. Notch filter should be configured, motor ranges set, a couple of PSC parameters addressed based on MOT_THST_Hover. Then run Auto Tune. Also the compass should be calibrated with Magfit. The normal tuning process.
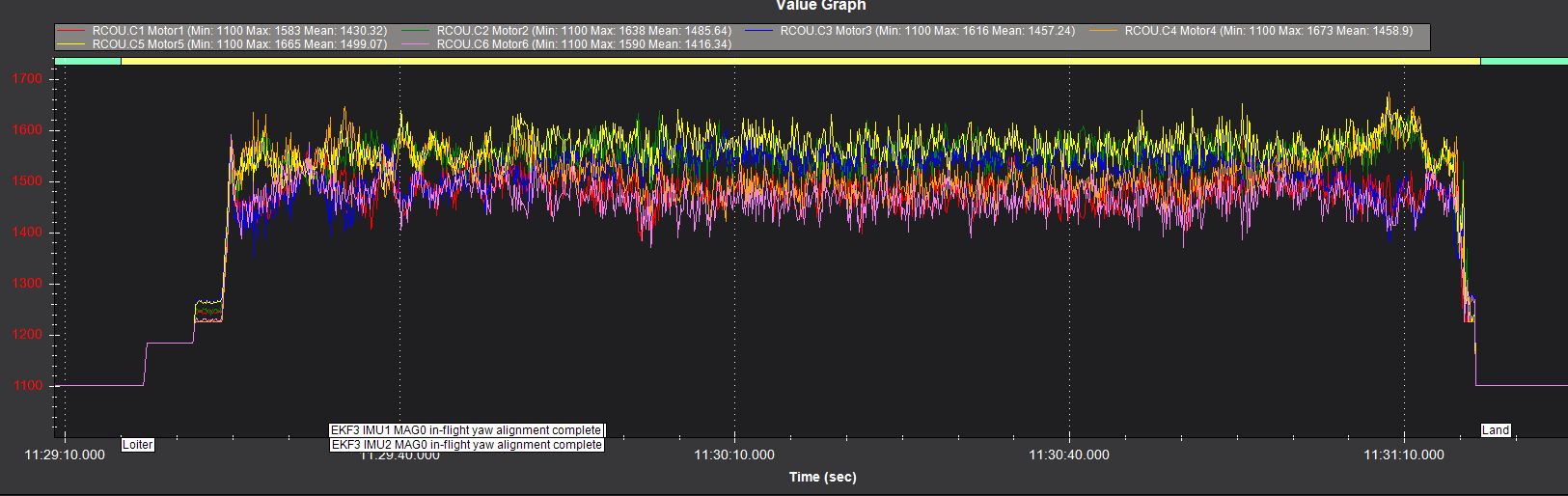
Hi Dave, I did re built the drone and tried to correct the yaw bias. Here is a new .bin log of me trying to recreate the situation that triggered the crash. Do you have an opinion or advice based on how it looks? flight log
Nice job, the Yaw bias is fixed! You can now proceed with tuning. Set these parameters and do another short hover flight in AltHold to collect data for Notch filter configuration:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
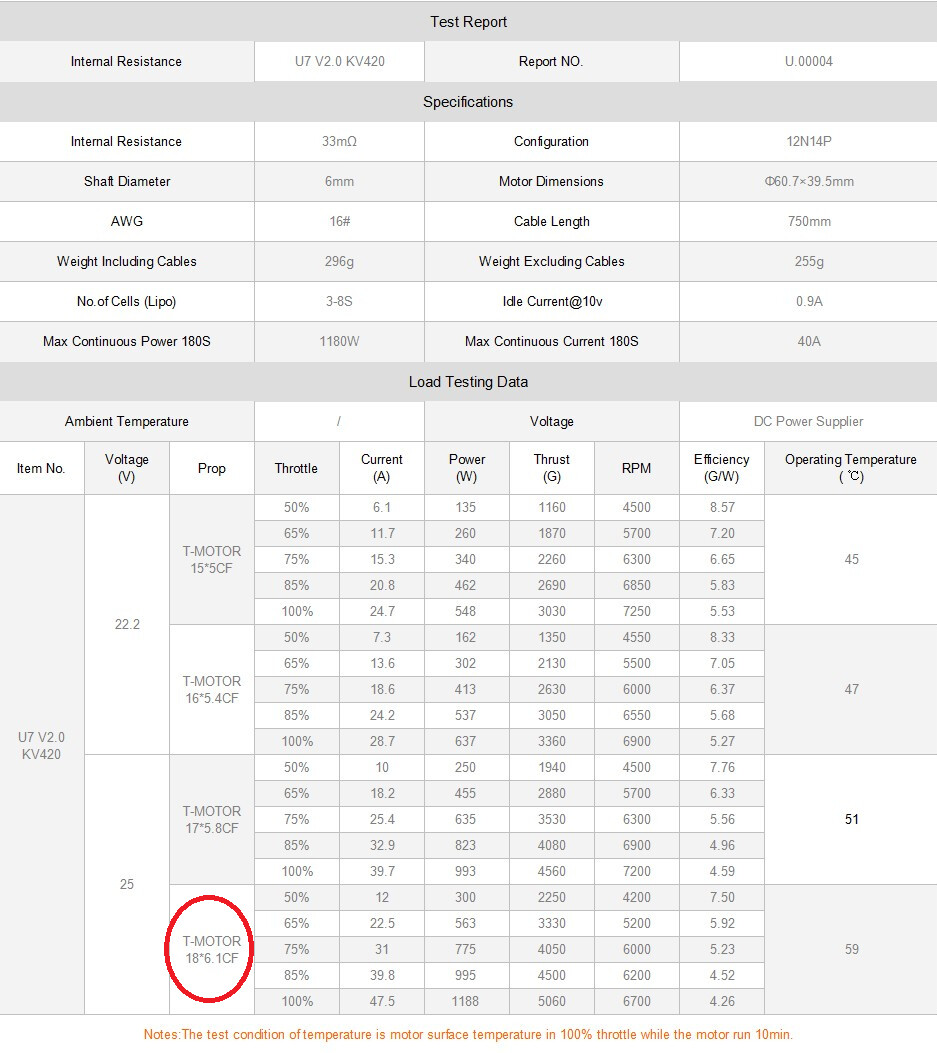
Quick question about the drone setup. I unintentionally used a motor-prop set for a 7S battery on my 6S battery drone. T-motor suggests 25V (7S) on the test sheet. Should I switch to a 7S battery before tuning, considering it’s meant for heavy payloads? Your advice is appreciated.
Just my 2cents worth: consider the T-Motor test reports more of a guide rather than hard data. Quite frequently the props listed are too big out in the real world. We dont know how T-Motor do those tests.
If you have good stability then you do have the right combination and the test report could be correct. If tuning is just not working, props could be too big.
ecalc is a better judge of whether the motors and props will work together well.