You need to upload the dataflash logs here so we can have a look and see what happened. But from the video I would guess almost certainly a mechanical problem, either a motor, a prop or an ESC (possibly an ESC desync). What motors and ESCs are you using?
From looking at your motor/ESC combination, I can almost guarantee you this is an ESC desync issue. You have very low kV motors which are prone to ESC desyncs, and ESCs which are intended for racing (very high kV motors). You might want to look at something like the Hobbywing Xrotor 40a ESCs which are well known to work well with low kV motors. At the very least with your current ESCs, make absolutely sure you don’t have active braking (damped light) turn on in blheli. This absolutely must be turned off with your motors.
If you upload your logs we can probably tell a bit more.
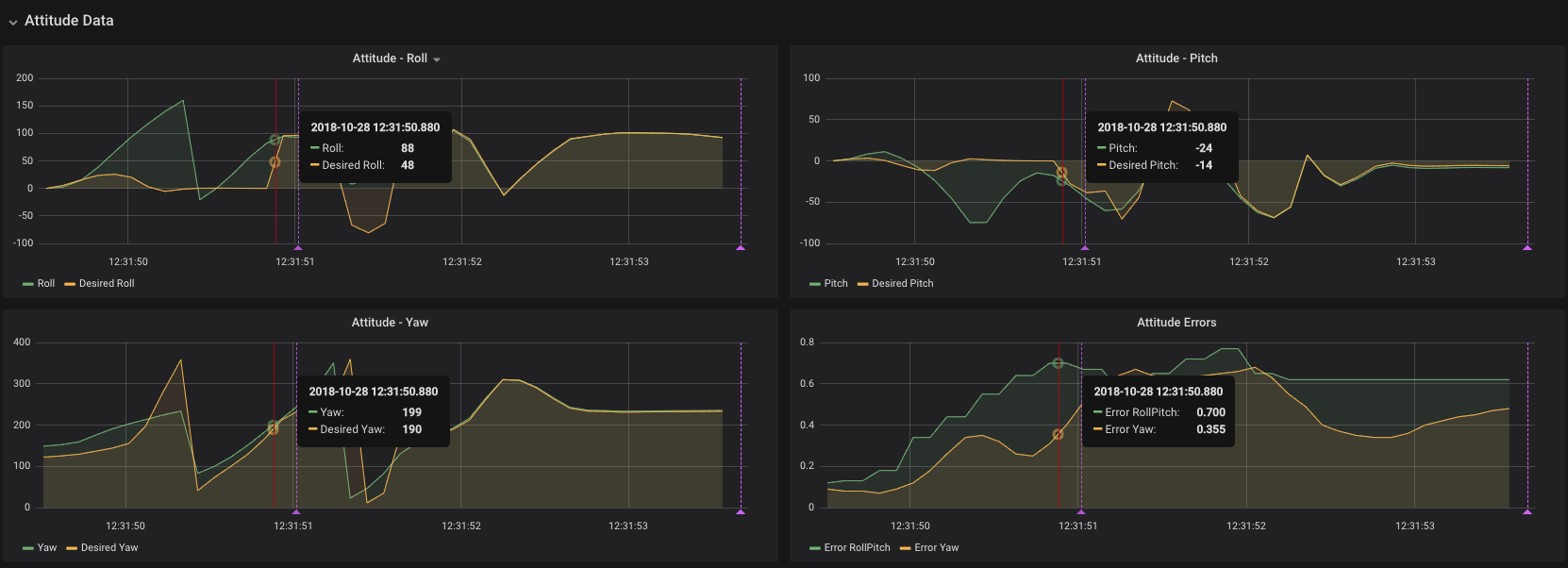
Hi, actually after looking at the logs it doesn’t look like an ESC desync. It could be a mechanical failure - starting at around 12:31:49.6 there is a big increase in Roll and Desired Roll, and Pitch and Desired Pitch:
I would normally expect this to be a mechanical failure on one arm - you can see in the video that the left most arm looking at the video seems to lose thrust and it starts to tumble, but if it’s a mechanical failure you normally see the autopilot try to compensate for this by pushing the opposite motor/s to full thrust and it doesn’t happen in this case. And, the RC in shows a large commanded change in channel 1 (roll) starting at 12:39:49.4, before the roll actually starts to diverge a few hundred ms later.
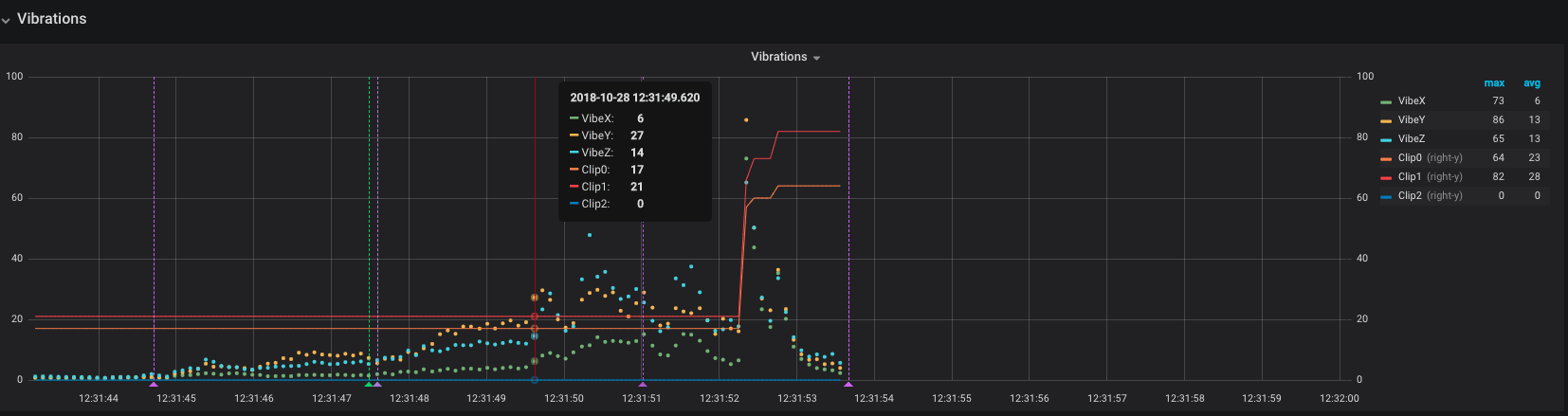
Edit: Actually looking at the RCout there is a flatline of RC3 (top left motor looking down on the craft) and a corresponding increase in RC4 (opposite bottom right motor looking down on the craft), so it could be a desync or mechanical failure of some kind. It’s possible with the increasing vibrations that one of the motor mounts wasn’t done up tightly enough and it started to rotate on the arm? I’ve found the Tarot 650 mounts prone to that problem.
Hello Sir,
I appreciate for your precious time to analyze logs.
I came to know it may be Mechanical or ESC sync problem.
Now which solution you will prefer if you were at my place.
Change Esc and go for rigid frame
Change Motor + Esc + Rigid frame
Update BLheli suit - “Off” to Active Breaking n new rigid frame
Some new option you may have.
I will explain little more about my last drone, this information may help you to analyze better.
Information-
Many times - While throttle is down to zero pixhawk automatically “disarm” (This is tried without propos)
This drone made for least 6kg payload, so I selected low Kva rating motor with high thrust.
In all Esc 5v BEC cable is not connected to pixhawk, only signal and ground is connected to Pixhawk. 5v BEC is cover with simple insulation tape.
GPS lock is not done in Mission planner/ GPS calibration is not done. 2nd (GPS) compass also not calibrated and I2C cable for second compass is not connected with Pixhawk.
Pixhawk inbuilt compass is well calibrated.
Flight was in Stabilization mode while take off and crashed in same mode.
One motor is little misplaced or misaligned to axis of Tarot arm. (Not more than 0.5Deg) This is before take off.
Request you to share your valuable feedback on the same so I can proceed further.
If you want i can share some images of damaged drone.