Hello all,
Yesterday something strange happened when trying to land a 17 inches quad running the las 4.1.5 Ardupilot version. The drone once touched the land, bounced 2 - times, started to rotate in yaw with no control and finally flipped and crashed.
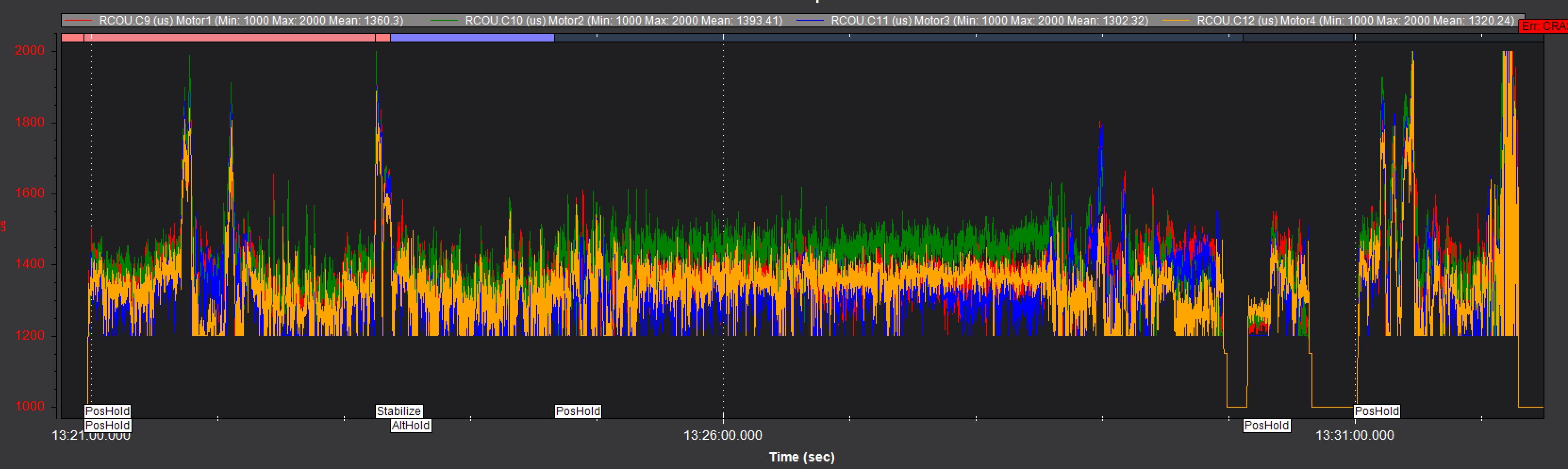
I was looking into the logs to identify why that happened but still is not clear to me. Here is the log if someone could please take a look.
https://drive.google.com/file/d/1-93kuaff9ofaGWAjOtq3lRLKq7_qDBjl/view?usp=sharing