I’m fairly new to quad flying, so please be easy on the criticism.
I finally completed my 3Dr quad copter kit and conducted its maiden flight over the weekend. Other than some initial difficulties calibrating the compass, things seemed to have gone pretty well. I initially left it in Stabilize mode and got used to hovering and moving it about. I then tried to put it in Position Hold mode expecting it to stay in one place, but it does not. It tends to drift off in one direction and I am forced to make a correction to prevent it from wandering off.
I’ve done some searching and have found a few posts on several sites referring to a similar problem, but haven’t found much of a definitive answer.
Some posts mention some tuning, while others say recommend trim adjustment.
What is the best place to start diagnosing this issue?
My setup is : 3Dr quad kit, 880Kv motors, Pixhawk, and I was using Tower on my Nexus 7 instead of Mission Planner.
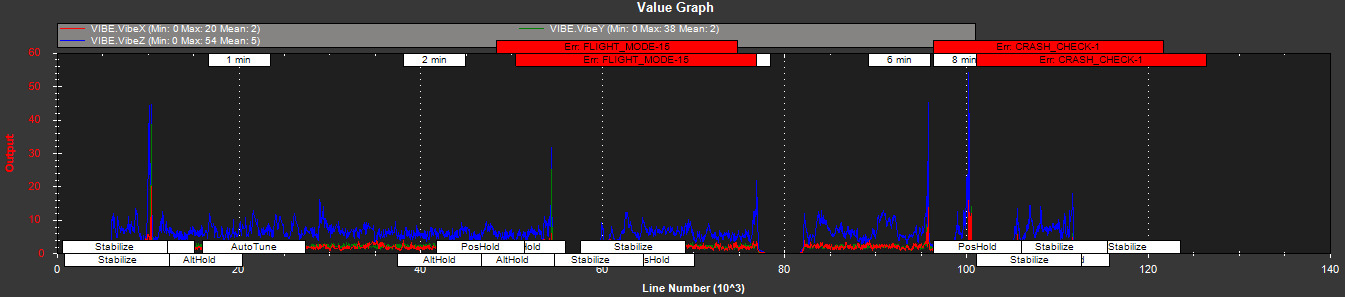
I kinda figured using the trim wasn’t the correct answer and probably not the correct way to solve the problem. As per your suggestion, I performed an autotune, but it doesn’t seem to have corrected the problem (Hopefully I did it correctly). I also figured out how to get at the vibration data and it seems to look alright to me, but this is also the first time I have ever looked at it. I have uploaded the graph that was generated.
OK, after re-reading the instructions for the autotune process it seems I did indeed do the process incorrectly. I will redo the process in the next day or so, and report back.