………………………………….
Nice.
………………………………….
Nice.
Thanks for all the help.
Carlou - I fly DRIFT often and have a lot of fun with it. I would assume it doesn’t matter at all whether a radio is mode 1 or mode 2.
For me and my mode 2 radio, the right stick controls pitch and yaw (and for you it would be the left stick), and the flight controller automatically controls bank (which is roll of course) so as to automatically “coordinate” the turns. Coordinated turns are quite graceful.
My left stick controls the motors/altitude.
It’s a lot of fun.
You could try drift mode by using, say, position hold mode (or RTL, etc) as a backup. Take off in your favorite mode, for instance, position hold, gain some altitude, and switch to drift mode, if the copter gets out of control, switch back to position hold (or RTL), and the aircraft will automatically right itself immediately.
One thing to watch out for is that the throttle becomes “manual” (which can be a surprise if you are switching out of an altitude hold mode, like position hold) - you are MANUALLY controlling altitude. So if the copter starts to climb or descend rapidly, it means you to adjust the throttle so as to stop the drone from climbing or descending.
Or, simply switch back to position hold and center the throttle to maintain altitude. Or of course, use RTL to just come on back home and land.
–
Bill
Hi @wsalopek,
Thanks for your explanation and encouragement. The reason I ventured into this mode is because of the coordinated turns which is nice. But because the Yaw and Aileron are reversed, I don’ want to get use to it and then confuse myself when I get back to the other modes.
I remember when I first drove in Australia from the Philippines, I almost met an accident exiting a roundabout because on the exit, I went to the other side of the road. It took me a fair bit of time to tell my brain to stay on the left. Horrible experience.
But I still did not give up. I think I can programmatically reverse Yaw and Roll in my radio when I switch to drift mode. Or maybe I will disable Yaw of this mode. This will me my next journey.
Merry Christmas,
Carlou
Carlou,
I don’t think controls are supposed to be reversed if a person uses a mode 1 radio (I say this without knowing the difference between mode 1 and 2, is it more than just using the opposite stick for the same thing? Duh - I should have read up on it first).
You would still push the stick forward to tilt/go forward, back to tilt/go back, left to yaw left, and right to yaw right.
You are experiencing something different?
I would start off with a neutral left stick - no pitch or yaw - (and adjust the throttle so as to maintain a fairly constant altitude) then push the left stick forward a bit, then gently towards the left/right - maybe not going past about the 11 o’clock direction to go left, or the 1 o’clock position to go right. It will quickly become apparent how much control movement to use to get the desired result.
And be ready to change the flight mode to, say, position hold (and let go of the sticks) should the copter start to do something strange.
Happy New Year.
I think the “problem” if there really is one is the benefit of one stick coordination is kind of lost. On a mode 2 radio you are using the elevator and aileron on 1 stick to fly it. Those are on 2 sticks on Mode 1. This would seem to defeat the purpose of the mode. Sure, you could figure out how to fly but why?
Sone day soon it will probably drop out like Sport Mode to save flash space…
I already figure it will be taken out soon hence I want to try it before that day come.
The only reason I want to try to reverse the Aileron and Elevator is:
Maybe the other option is when you come back to hover, switch back to the other flight modes.
In OpenTx or EdgeTx mixer, you can reassign CH2(Aileron) to the Yaw stick and CH4 (Yaw) to the Aileron stick. No change in Aurdupilot. I will have to try it out so don’t get me wrong. Not proven at the moment. The only reason I want to do this is when you get back to hover and try to back left or right using the aileron stick, the copter will do a Yaw. While if you want to Turn using the Yaw stick, the copter will roll. In mode 1. I alomst crash.
Here’s my solution to drift mode in EdgeTX. Might not be as elegant but it was a fun exercise. The idea is I can set the speed of the quad with a slider, and then just steer it around with yaw stick, one handed. The quad must be in loiter mode (based on switch conditions) for this function to be available.
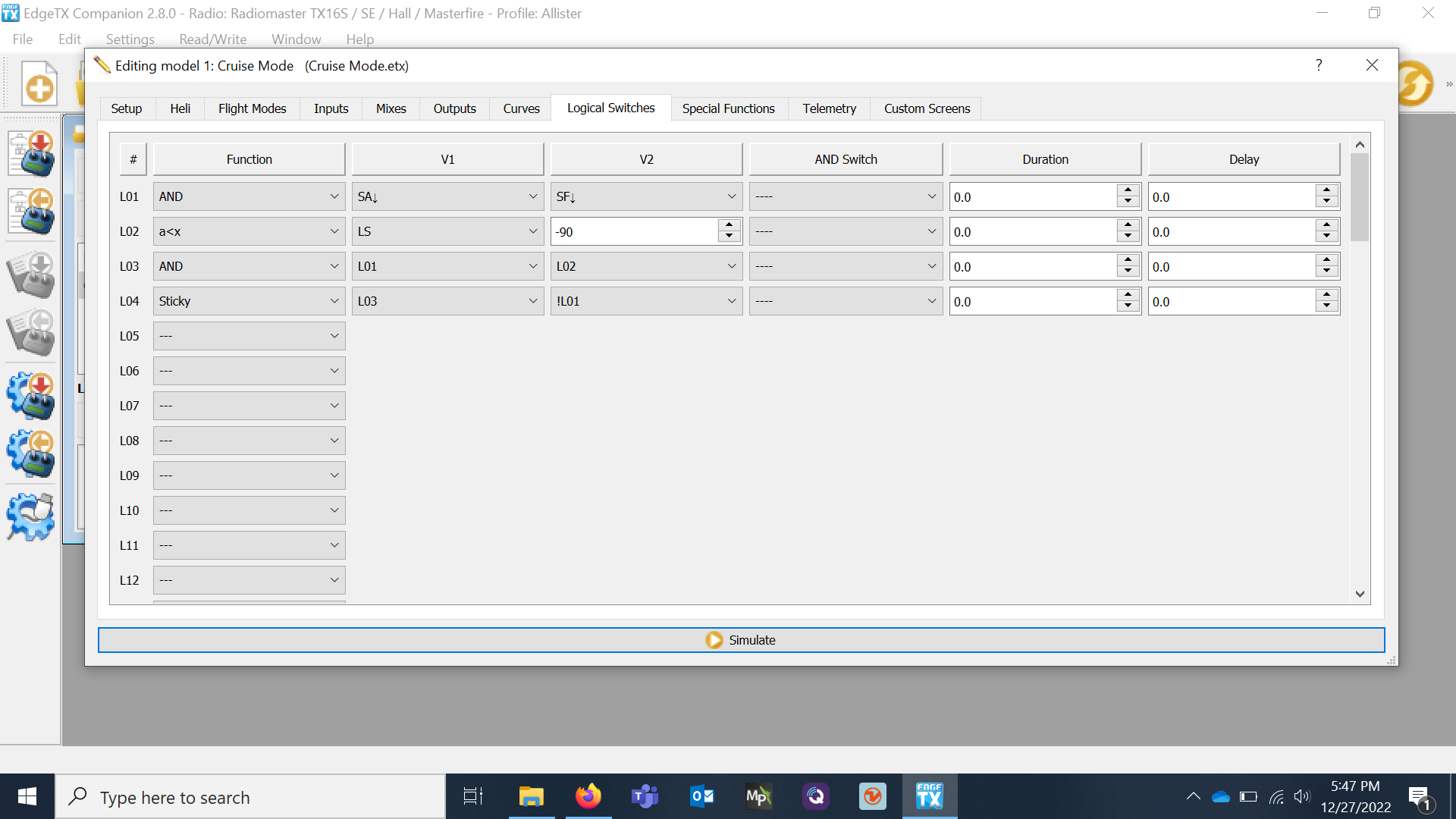
First is the logical switches:
L01 - SA is a place holder for whatever mode switch you use. On mine I use the 6-position switch but for some reason that didn’t work in the simulator (works on the real radio). So the switch has to be in whatever position represents Loiter mode. SF Down is the switch that turns on “Cruise Mode”. All this to say that the quad needs to be in Loiter, and Cruise turned on.
L02 - The left slider must be below -90, or almost full down. this is a safety to make sure you can’t active cruise mode if the slider is up. This way the quad doesn’t drive forward on you when you don’t expect it.
L03 - straight forward. Both L1 and L2 need to be met to turn on Cruise.
L04 - Once L03 is on, L04 will stay on until L01 is no longer met. This means if you change flight modes on the radio, or turn off cruise mode, either will stop it.
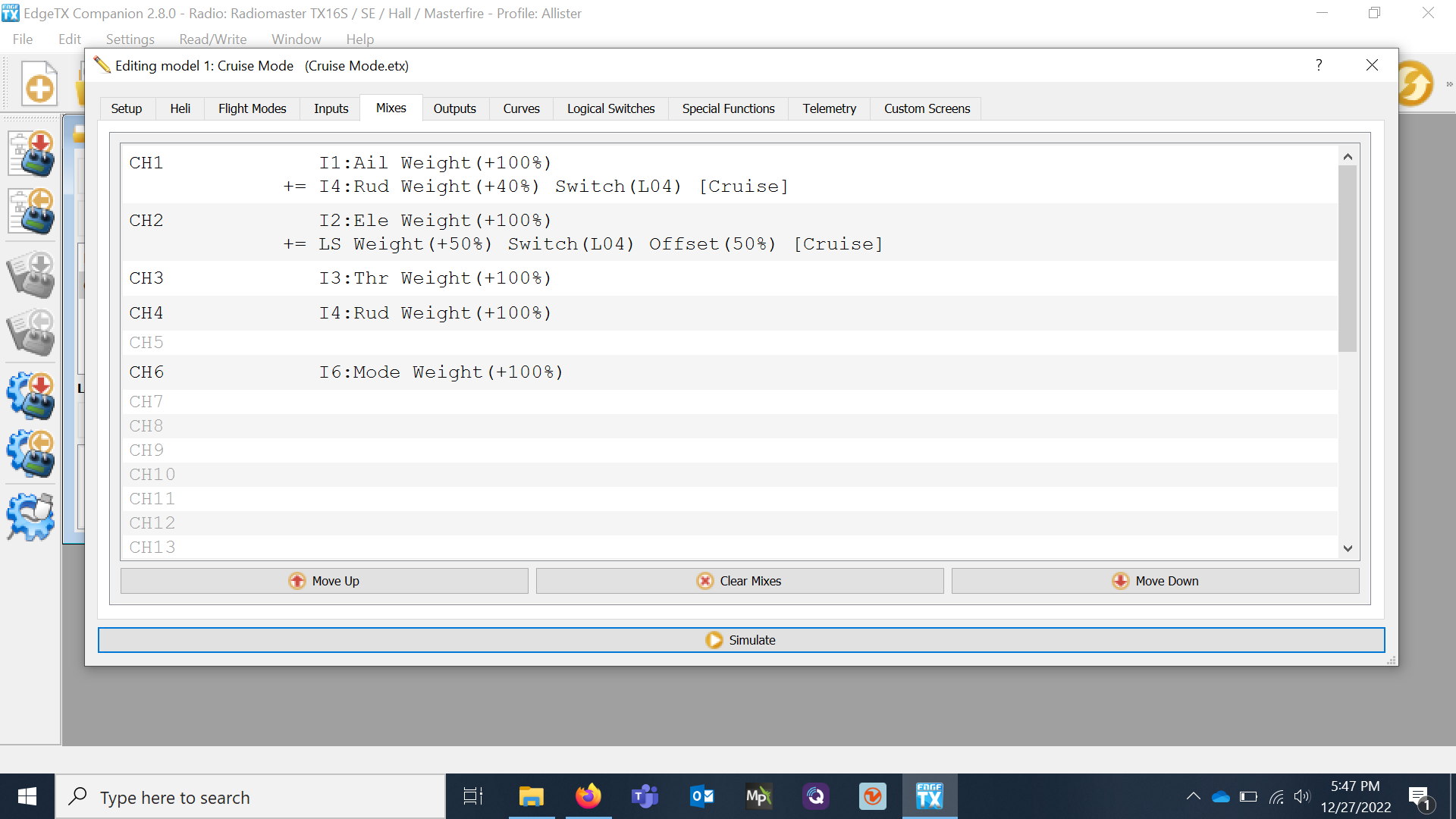
Next is are the mixes:
CH2: When L04 is active, the position of the left slider is added to the elevator (pitch). The weight 50% and offset 50% keeps the position of the slider only positive. So you can’t use this cruise mode to go backwards. This is only mixed to the input so if you use the pitch stick it will either add or subtract from value of LS. Worst case you have the slider at 100% and you panic and pull the pitch stick back the quad will stop.
CH1: Since the idea is to steer around with just yaw, I’ve added a little bit of the yaw input into the roll so the turn will be coordinated. The weight of 40% is a guess. Adjust as you see fit for your quad. Also note: I’ve been using this cruise mix for a while without issue, but never with the roll added in. It works in the sim but I haven’t flown it like this yet. Winter…
Here’s the ETX file if you want to try it in companion. The model isn’t complete (no arming, etc) but you can test this mode if you want.
The only mode you need for this kind of thing!
I tried the concept I mentioned above but I didn’t like it. I think drift mode is not for me.
I will try your concept after new year. And thanks for sharing it. Appreciate it a lot.
Because this method is just working off the yaw input, it shouldn’t matter what stick configuration you’re using. Let me know what you think if you get a chance to try it.
You’ve got me thinking this might be a good reason to finally learn lua. Because I’m only considering the flight mode off of a switch position, I wonder if I could use a lua script on the radio to look at the mode from the telemetry. That way if the mode is changed by GCS or whatever, the cruise function would kick off. Hmm… So this is how it starts.