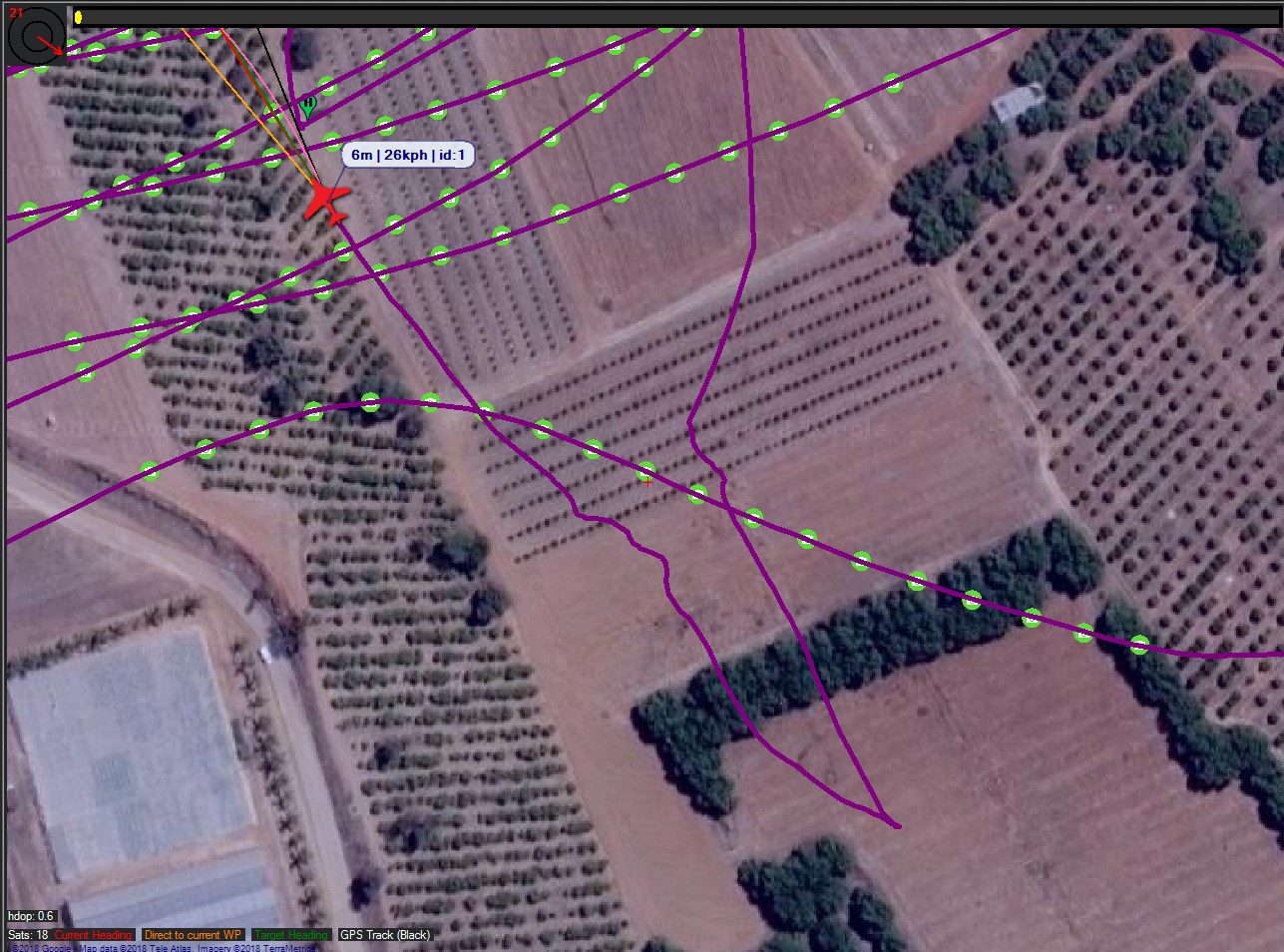
Somewhat concerned about the planes inability to hold position in wind, you can see in the image above the point at which the plane transitions and then starts to drift backwards.
I had to switch to stabilize and carefully nurse the plane closer to a safe area to land. Plane seemed unable to pitch forward to hold its position in AUTO/RTL, but was able to do so in Stabilize, desired pitch (NavPitch) did not request a higher pitch angle. Why?
I was wondering if you had the V1 or V2 version. On the V2, they are touting better resistance to wind. I was aware of the Q_WVANE_GAIN parameter but never played with the Q_VFWD_GAIN parameter. I’m at work so I can’t download your log (blocked). I wondered what your Sat count and hdop were during the drift. It would be great if you could get hold of the V2 parameters and post them.
Cheers!
Foxtech Nimbus VTOL is a Vertical Take-off and Landing airplane, in this version, we equip 28kg high speed tilting servos , with the newly upgraded system, the plane can hover like a multicopter more steadily and take off and land in very heavy wind.
The highlight of Nimbus VTOL is the wind resistant feature. It means that when the plane is in multicopter positioning mode, or in Auto mode, during taking off and landing stage, the two tilting motors will tilt to a certain level to compensate the wind, that keeps your plane much stable and also give you much better safty during landing and taking off stage.
I have the V1 version, I haven’t tested it yet with either Q_WVANE_GAIN or Q_VFWD_GAIN parameters so that would be the next step. Was a little surprised to see that it couldn’t hold it’s position in the wind which was only about 26km/h (16mph) yet in stabilize mode I was able to actually fly it forward. So assumed something in the software was preventing it from perhaps achieving the angle to overcome the wind resistance.
Sats and HDOP were 18 and 0.6 at the time of the drift. I am looking for the v2 parameter file*, Foxtech was not keen to send it to me as they say it’s aircraft specific (but of course one can leave out all the aircraft specific params).
Will report back if I have success with those params mentioned