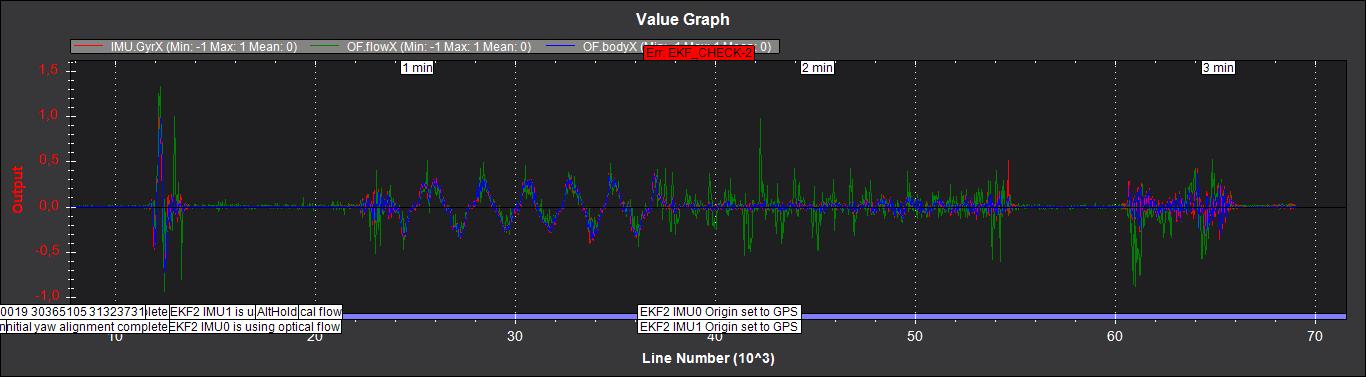
Hello everyone, I followed the steps for the calibration of the optical flow sensor and after performing the test I get the following graph.
Is noise so normal when the movement is not on that axis? The same thing happens to me for both roll and pitch.
Sorry, I wish I had more experience with px4flow, but I assume it should be normal being that optical systems usually do have a lot of noise. Are you trying to use px4flow with the gps? If not, I believe you should set EKF_GPS_TYPE parameter to 3
Yes, i used this parameter with three.
Thanks again @Luiz_Felippe_Ozorio