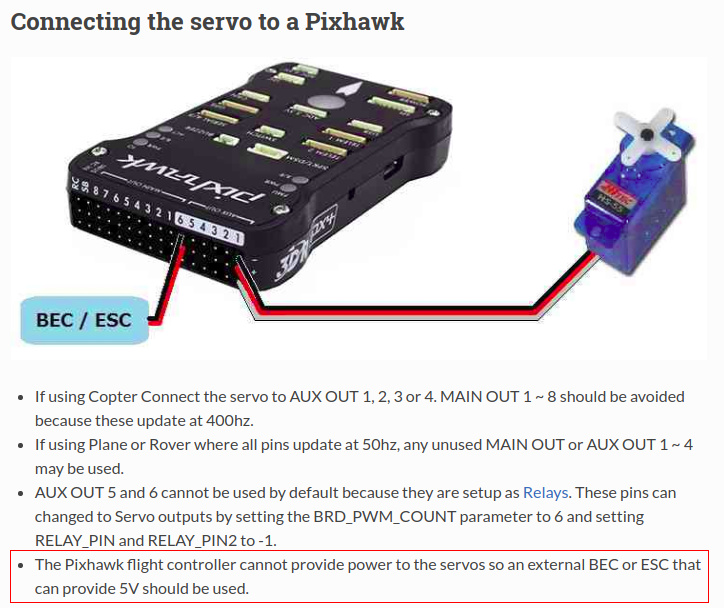
I’m a newbie in rover ardupilot. I have a doubt relation servo connection. In rover documentation informs that is necessary to provide a 5V BEC power to pixhawk in order to use servos (Figure below).
I bought the following ESC with BEC (xt-xinte 30A BEC 5V/3A) :
Can I use this ESC for this purpose? If yes, regarding the connection with pixhawk, I have three cables (blue cables) to connect but as we can see in figure above only two are required ( I think they are power cable). Which ones should I use?
That ESC has a built in BEC so you won’t need the external 5V BEC shown in the picture. I guess you’re using that ESC to control the rover/boat’s motor… or are you only using it as a BEC?
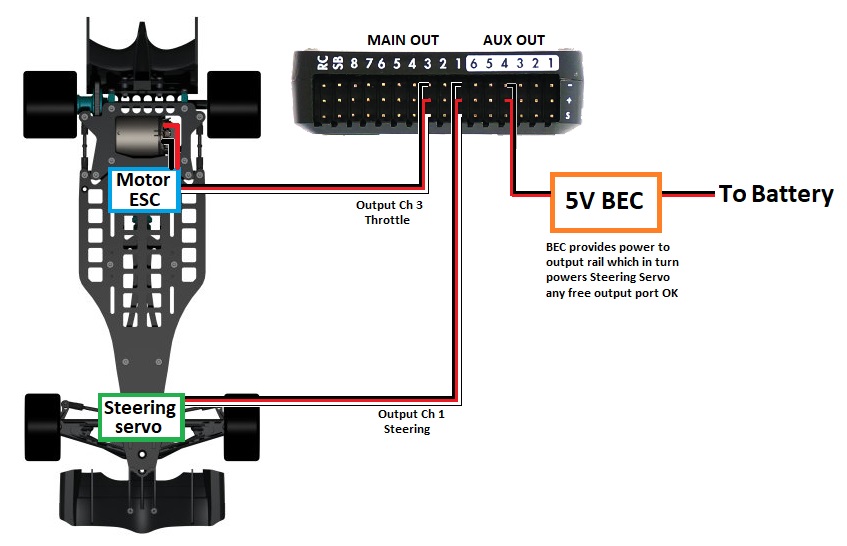
If you’re only using it as a BEC then you can just plug it into any unused output on the back of the pixhawk. The black wire should be at the top, the red in the middle and white on the bottom (at least if you’re using a Pixhawk1 or similar). If you’re using the ESC to move the motor then it should be plugged into MAIN OUT 3.
By the way, it’s a bit dangerous to power the Pixhawk only from the rear servo rail. It’s best to use a power module which provides separate power to the pixhawk through it’s POWER port. The issue is that servos can sometimes cause a fluctuation in the voltage and if power is only provided through the real servo rail, that fluctuation will flow into the CPU and sometimes that can cause a “brownout” and the board may stop responding.
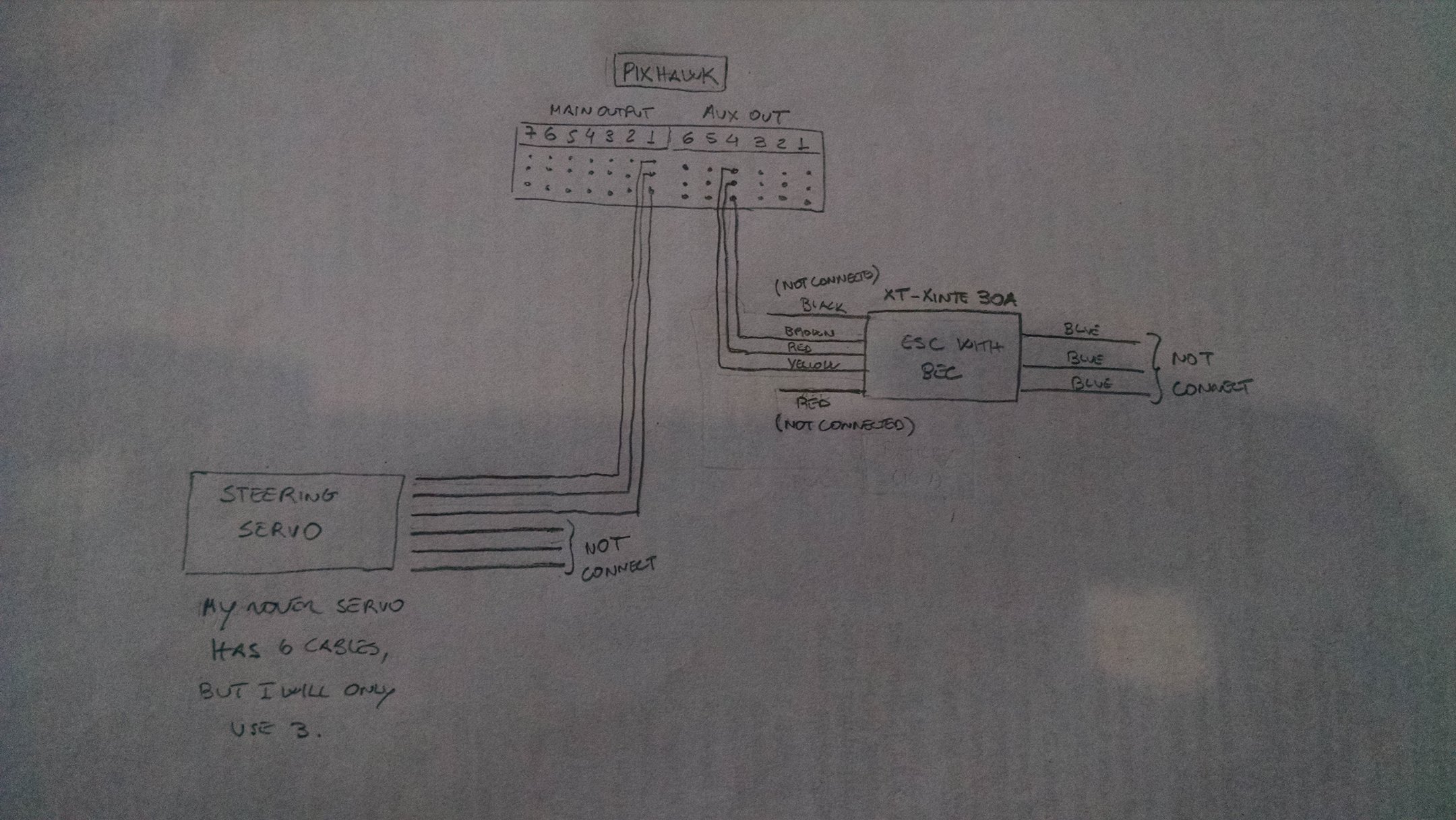
@rmackay9 Thanks for your response. I bought this ESC for my drone but I liked to use in my rover. My objective is using this ESC only it as a BEC because of the pixhawk requirement to move steering servo. I’m using pixhawk 1. Bellow, I draw a schematic for connection. Did I understand correctly? (Sorry for my terrible drawing )
Regarding rear motor thanks for your explanation but I’m using this ESC (link bellow) to power the motor. I tested using the “Test motor” option available um Mission Planner and it works correctly.
@rmackay9 Thanks for your reply. I thought it would need power because in the rover’s documentation it states the pixhawk has no power to move a servo, in my case the steering servo.
So in my case, I only need to connect the steering servo cable (three cables) in MAIN OUT number 1. Pixhawk will move the servo correctly.
"The servo has six wires? I wonder what those are for… anyway…"
I made this question for me too. But in rover has two limit switch and one buzzer in servo shaft, maybe these extra cables are used for this purpose.
If you look to the hand drawing of Felipe, this is not correct.
On the drawing the brown cable is connected to the signal line while the yellow cable is conneted to the ground bus of the Pixhawk. It needs to be the other way round.
 )
)