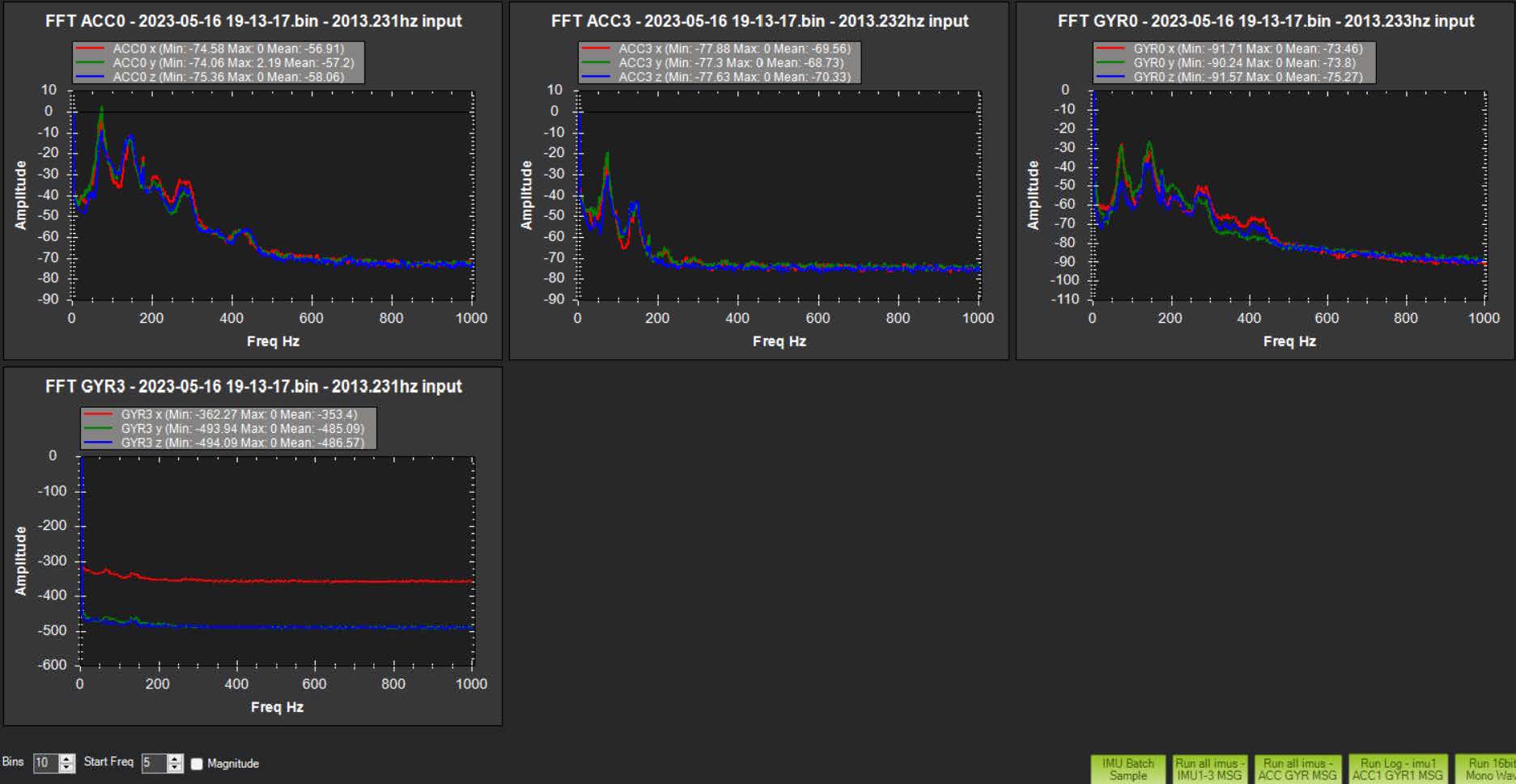
I’ve got a 15" quad I just set up the dynamic notch filter (throttle). The post-flight looks lower than anything I’ve seen before. Is it possible it’s over-filtered lol? Also, my graphs are FFT GYR0 and FFT GYR3. All the FFT graphs I’ve seen are FFT GYR0 and FFT GYR1.
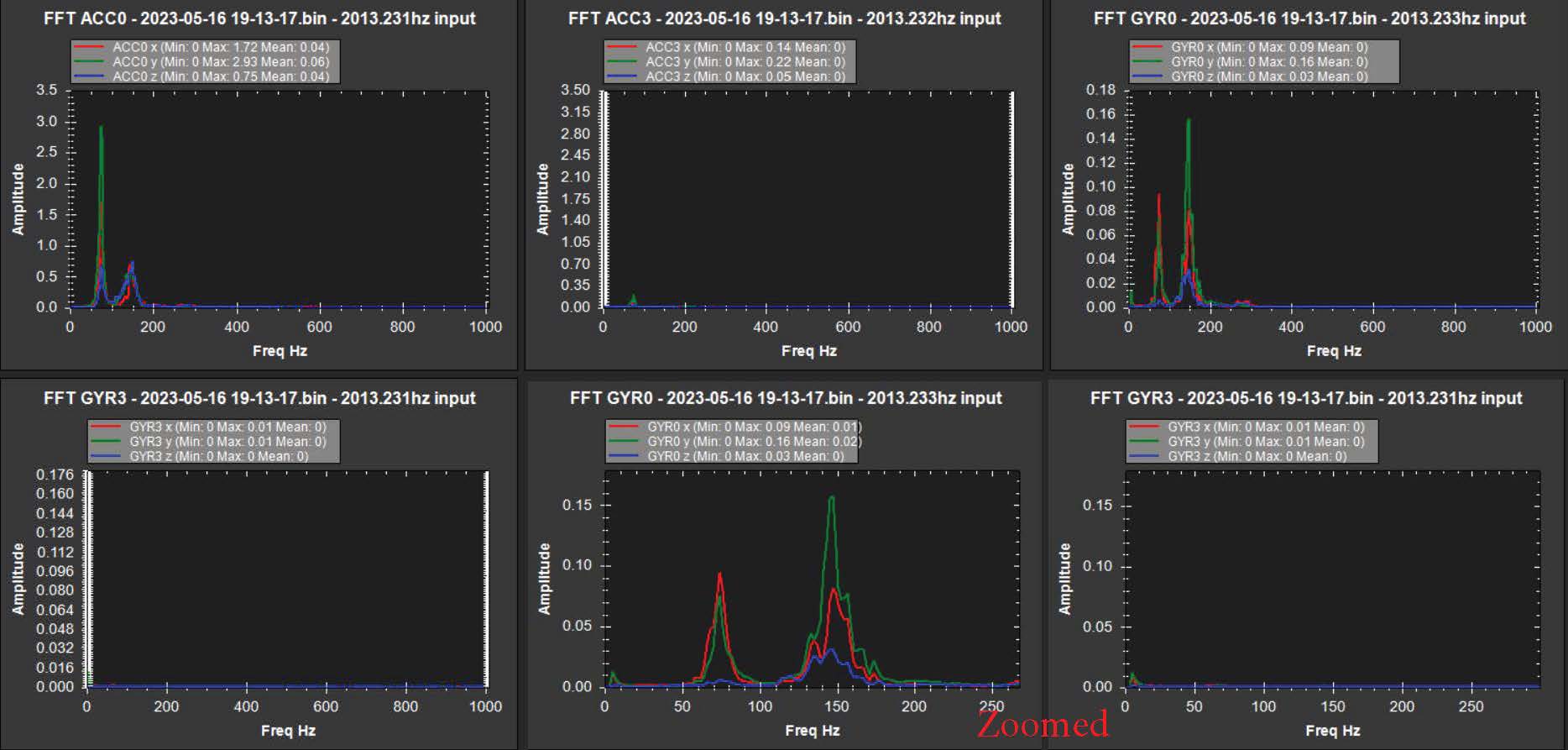
You should select the “Magnitude” check-box at bottom-left then load the log into the FFT analysis window.
This will give you a view that is much easier to understand.
The graphs you should examine are Gyro0 and Gyro3, corresponding to pre- and post-filter data.
15" props should be around a frequency of 60Hz give or take, so your values could still be correct.
The frequency will depend on the copter weight and amount of RPM required to hover - just so you are aware of why yours might not be at my predicted 60Hz.
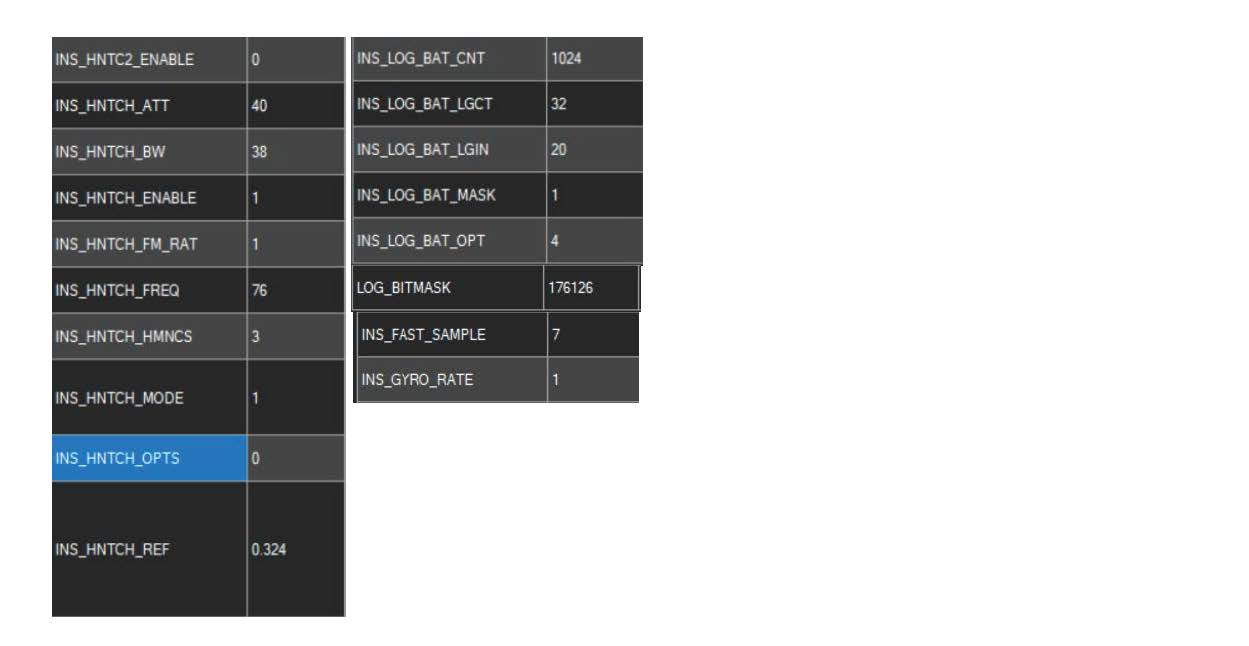
Set INS_HNTCH_FM_RAT,0.7
Thanks! I selected magnitude this time. I looked a little closer a the FFT and it looks like 74Hz instead of 78. Not sure if that will make a lot of difference. I change it with the INS_HNTCH_FM_RAT at .7 tomorrow (ran out of daylight). And then an autotune. Here’s the log file if that helps:
One more question. Would I increase the frequency of the ATC_RAT_PIT_FLTT, ATC_RAT_RLL_FLTT and ATC_RAT_PIT_FLTD, ATC_RAT_RLL_FLTD from 15Hz to maybe 40Hz.
no, leave them at 15, that’s correct
This spread of motor outputs is what’s giving you that wide bandwidth too
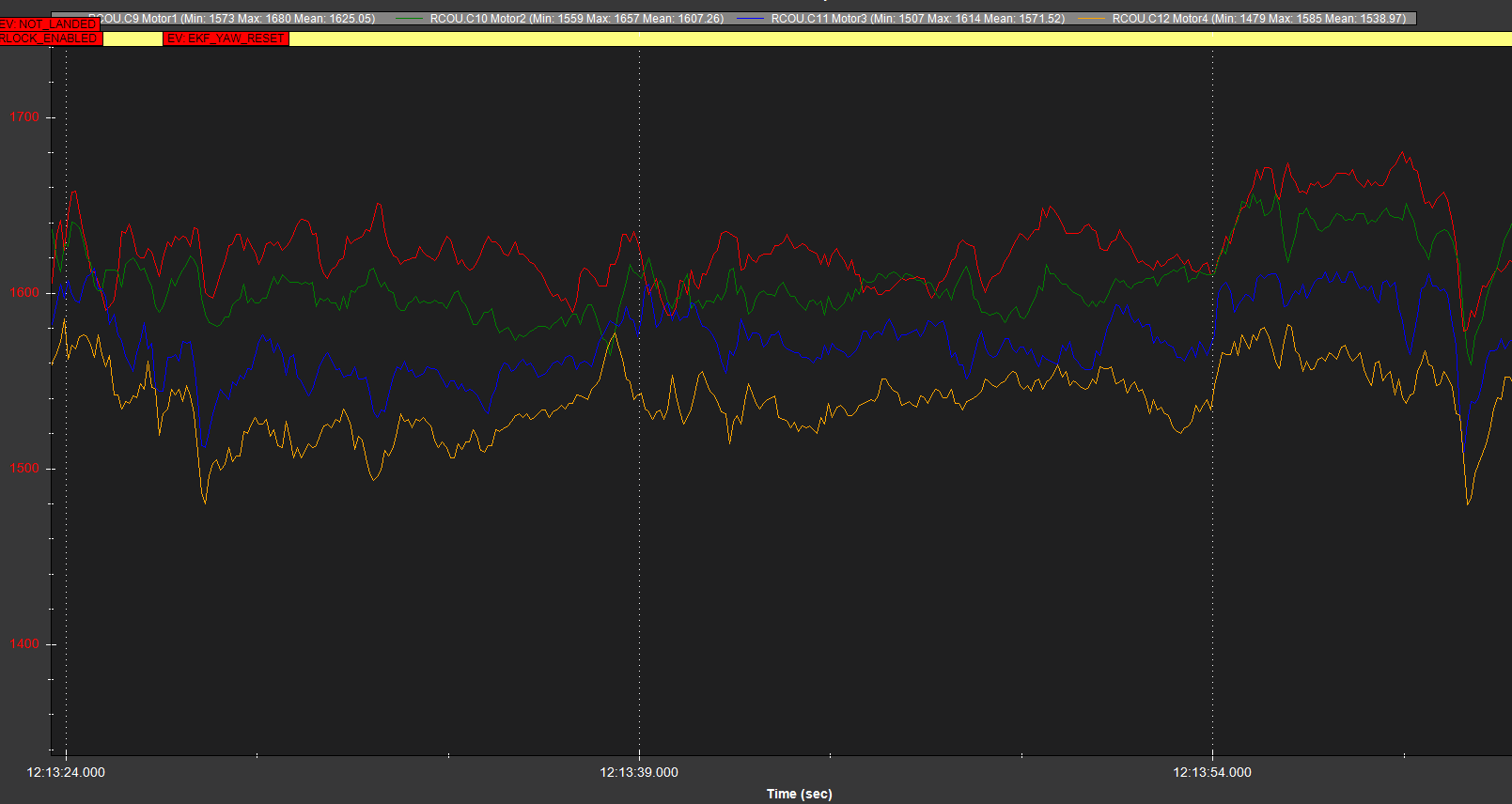
So see if you can better even out the weight/balance and check for any twisted arms or motor mounts. Even imperfect props can cause one or more to have a higher required RPM.
A more narrow bandwidth is better for Harmonic Notch performance - yours is exactly right how you have it for now, INS_HNTCH_BW = 38 . Any improvement to the motor outputs to bring them more into line means you will be able to reduce this bandwidth setting. It wont have a drastic fly/no-fly effect but anything you can do to improve flight efficiency and attitude control is a win and it will pay dividends in the long run. You’ll be able to more easily see if anything is going bad.
You can safely set these:
ATC_THR_MIX_MAN,0.5
BATT_FS_CRT_ACT,1
INS_ACCEL_FILTER,10
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
Give it another test fly, then run Autotune on pitch and roll axis
AUTOTUNE_AXES,3
Yaw can be done separately, it’s not as critical.
I didn’t even think to check the rc out. It weird that motors 1 and 2 are working harder than 3 and 4 given 1 and two are diagonally opposed. Not to mention the cog is dead on. Has to be a twist. The props seem fine. These are tmotor ns ultra lights. One of the only props the I didn’t need to balance. The arms are square and the propeller tips line up by eye. I’ll block the arms up and do a more accurate assessment. Maybe ever check the blheli 32 settings. Can’t imagine how I’d goof that😂


Could it be those arm folding mechanisms allowing some twist under load?
I can tell you for sure that this frame has plenty of flex. Got on for testing a year ago and i have lots on finding on it. First being that the main plates are not full CF and not enough standoffs. You can even flex it by hand as is assembled with no significant force. The 10mm Square tubes also twist a bit.
Took plenty of mods to make it rigit enough.