I’m working on a project that will have an aircraft suspended in the air for a long time - to avoid any I-term windup i’ve been throwing it into manual mode while it waits for commands. Somebody told me to try STANDBY mode because I term might still be topping out in manual mode.
I tried STANDBY mode in dronekit but from what I can see it either doesn’t exist or it’s under a different name? Does it even exist for plane or is it just for copter?
I’m not familiar with STANDBY mode in ArduPlane. Can’t help there.
In MANUAL mode the PID controller is not active. There should be no I-Term issues there. Also no stabilization or assistance from the flight controller.
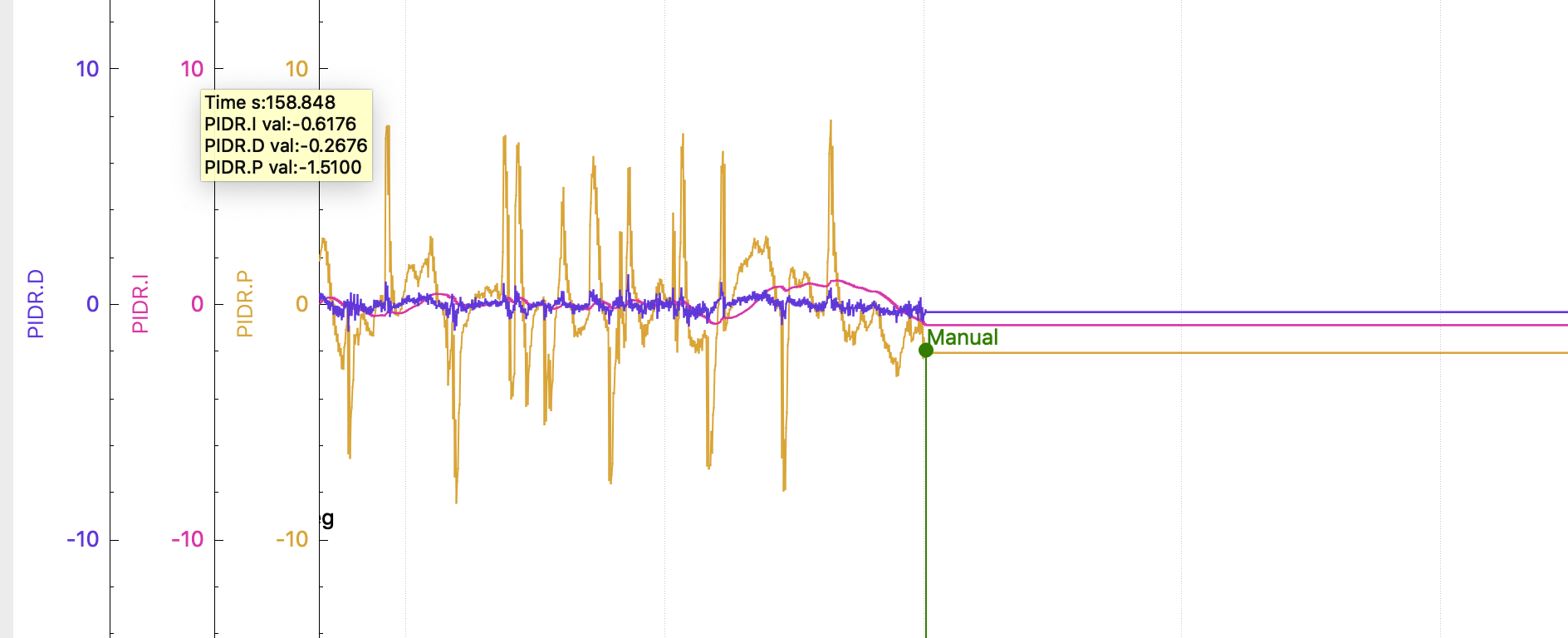
In the image you can see my PID Roll values. I went from CRUISE mode to MANUAL and everything goes flat (and I assure you the airplane didn’t )

 )
)