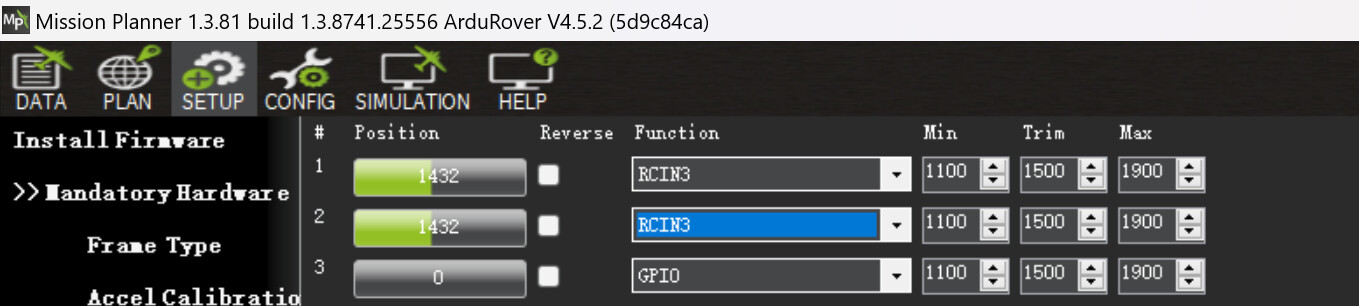
If I set motor PWM pin to RCIN, then it can move forward and backward. But it can’t be controlled by arm/disarm button.
And it means my hardware is OK. There is definitely some configuration params that I have missed.
EDIT:
THR_MIN has been superceded by a MOT parameter. And currently, it can’t be set to nagetive values. I think it might be the reason.
