@count74 I made progress.
After configuring throttle, the throttle can be controlled by RC controller. But there are still some issues:
- a) @stephendade set manual and arm the rover (without GPS unit, nor compass; well just ignore those warnings). Right now I don’t know what’s happening here.
DO as @Oli1 says. After set COMPASS_ENABLE = 0, all the warnings are gone!

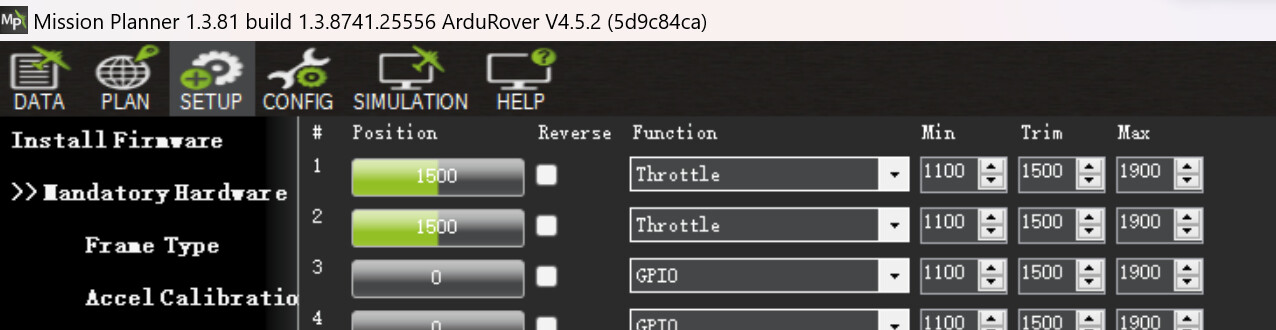
- b) @count74 As the above process, arm the rover from MP, it can only move forward, can’t move backward. I don’t know if it’s something to do with the “position configuration”? I fly copter most of the time, so the throttle is at 1000 by default. Is there anything I should configure ahead?
- c) I can arm/disarm from the MP, but I can’t arm/disarm Rover from RC controller? Any ideas?
set channel8 for arm/disarm, problem solved; Arming and Disarming my rover from RC - #2 by dkemxr