I believe the telem output on the APDs is the same as BLHELI32/DSHOT telem.
There’s no old fashioned shunt resistor for current so I guess current is derived from FET duty cycles or some such calculation.
I’ll have to rig up a test of the APD ESCs I’ve got sitting here and see what telem data I get
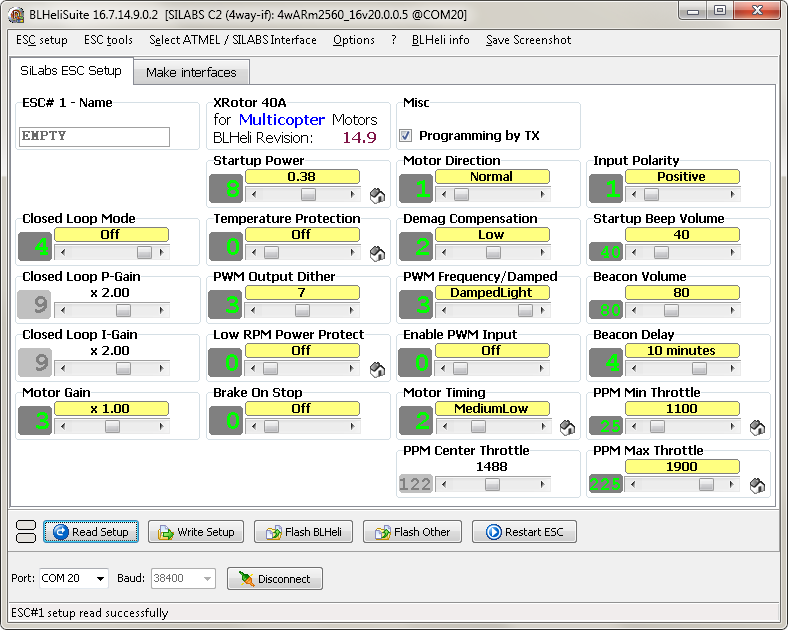
Hi could someone look over these settings for me? Just flashed my 7 year old Hobbywing Xrotor 40a’s to blheli. I have 2 quadcopters pretty much exactly the same, 880mm 15.5x5" props, 380kv sunnysky motors.
DShot/Betaflight Telemetry : Standard DShot telemetry format used by most flight controllers. Requires a DShot signal input to request the telemetry before it is transmitted.
PWM Telemetry : Forces the output of the DShot telemetry format at 1Hz. Each transmission is terminated with 2 stop bytes, and has the following format:
RPM Output : Outputs a pulse for each complete electrical revolution of the motor. Pulses per minute indicate electrical RPM, which can be converted to mechanical RPM by dividing with the motors pole pairs. This can be used with Governor systems.
If the Flight Controller you are using has a Bdshot target give that a try too. You will know if it’s working if you disable ESC telemetry but still have ESC RPM in the log.
Very cool. I was looking at the APD F-Series 40F3 6S 40A 32-Bit ESC units priced nicely at $29 but no stock. In fact I don’t see these anywhere but GetFPV. My success at very fast auto missions has me interested in building a fast 7". My 4" that does ~43 m/s runs out of gas in a few minutes!
Those sport old, slow, 8-bit microcontrollers and are very prone to desynchs. The old 8-bit BlHeli helped some, but not that much.
I’d get some serious modern BlHeli_32 ESCs and replace those. Take the 35A Tekko32 F3 (with emphasis on F3 ) for example. I have them on two quads running 6S, 390kV and 15x5 flawlessly.
The only slight mishap I ever recorded with race-type BlHeli_32 ESCs on 6S and 15-16 inch props was thermal throttling, and that only on some early-ish batches. For ease of mind I’ve added some thermal tape and - with attention to any caps that pop higher then the FETs - aluminium heatspreaders.
Here’s a brief test of APD 80F3 using a spare motor and prop and MissionPlanner motor test.
Pixhawk1 with DHSHOT300 on Aux outputs. The mounting and frame is just for testing, I’d normally mount these ESCs inboard.
The low speed tests are 2% , 5% and 10%
I’ve since done some quick tests up to 80%, but this is not flying or burn-in testing. I believe the APD ESCs are tested before being shipped.
Was on the phone with sam this morning again about their tests and they test them to 300amps (F3 80amp) with back EMF (not just a resistive load) on each ESC that leaves APD
They test to 260 amps on the 40 amp esc as well!!!
I have the specs for all of their testing if anyone wants it
I got the 80F3 but wasn’t sure how to configure them in Ardupilot. So, “behave like BLHELI” means, I can follow the setup instructions like a normal BLHELI ESC?
The APD ESCs shouldnt need any configuration changes at all, just feed them with DSHOT 300 (or higher) for best outcome, or other protocols if you like.
There is an APD configuration program you can download, but probably not needed.

.png?alt=media&token=ba92c430-0dbe-425c-8044-d544798fcd85)