Hi All
A new frame class dodeca hexa is added recently in Copter Firmware.
But there are no details about how to connect ESCs to Pixhawk and there relevant Propeller Directions.
Any help ??
Hi All
A new frame class dodeca hexa is added recently in Copter Firmware.
But there are no details about how to connect ESCs to Pixhawk and there relevant Propeller Directions.
Any help ??
Hi Robert,
Thanks for giving this a try. As far as I know, nobody has tried it yet but we are fairly confident that it will work ok. If you have problems, just report back and we will have a look. You’ll need to use AC3.6-dev by the way (it’s not included in Copter-3.5).
The motor order is
motor1 : front right top (counter-clockwise)
motor2: front right bottom (clockwise)
motor3: right-top (clockwise)
motor4: right-bottom (counter-clockwise)
…etc.
But how would i connect 12 ESCs to Pixhawk.
AUXiliary OUTputs 1-6
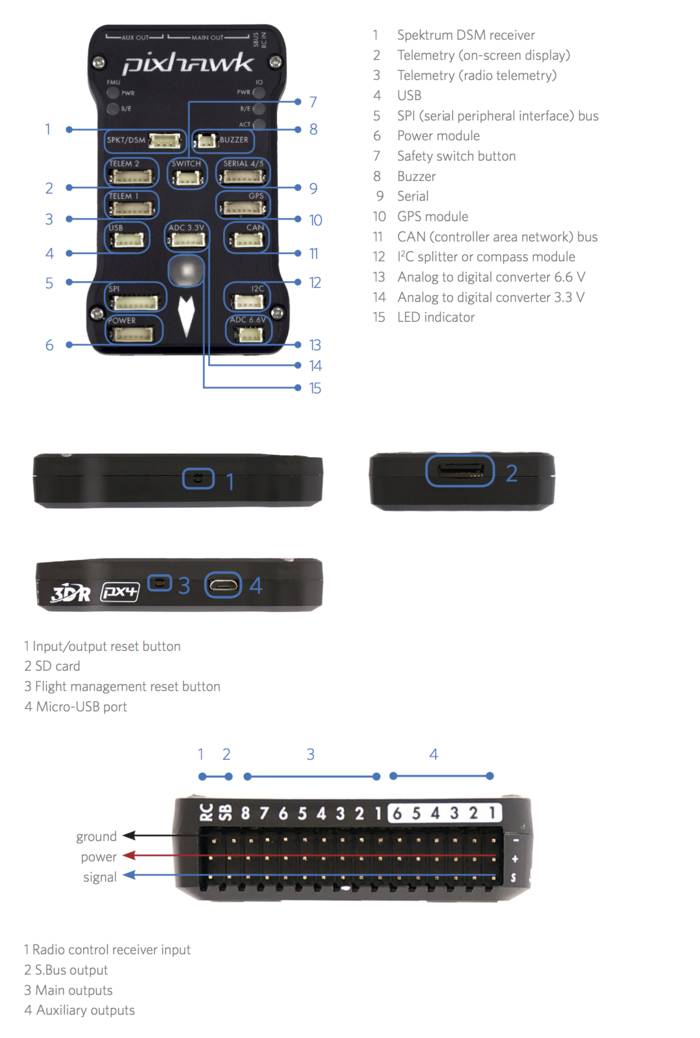
Do you mean first 8 in Main Outputs 1-8 and remaining 4 in AUX 1-4
@R_Q_Robert,
yes, motors 1 to 8 should be connected to the MAIN OUT pins. motors 9 ~ 12 should go into AUX OUT.
Could i try this with AC3.5 stable release ??
1st Question
Would it be possible to use CH7 to CH12 like
CH7_OPTION : RTL
while at the same time 12 motors are connected to Pixhawk.
Second Question
Would Pixhawk MCU overload controlling 12 outputs ???
No, I’m afraid the dodeca-hexa didn’t make it into AC3.5 so the next best choice is to use “master” (aka “latest”). This is slightly risky because the software won’t have gone through beta testing so it’s fly at your own risk. It’s fairly stable at the moment though.
To load “master”, go to the MP’s Install Firmware screen and press Ctrl Q. You should then see the version changes to APM:Copter V3.6-dev and you can pick any of the multicopter icons (quad, hexa, octa, tri, y6) because they’ve all been consolidated now.
Unfortunately , i cant run 3.6-dev on my dodeca-hexa (due to the risk of alpha testing)
i was expecting its support in some point release of AC3.5 .
@Robert,
That’s possible that we could add it to a point release… there certainly will be a point release - the timing of that depends upon when other critical issues come up and how quickly we can sort them out.
I would be very thankful to you
Sorry if I am being a bit of a Biff but Im new to the Arducopter.
I am trying to get the dodeca selected but I dont see it anywhere in the choices. I pressed the Ctl+Q to get the latest firmware which worked but it only allowed the ‘standard’ frame types. I selected the hexa although if I have understood things correctly this shouldn’t matter as such if all of the frame types are consolidated. On plugging in the Pixhawk and selecting Frame type I cant see a dodeca. The attached is all I get. What do I need to do to get the dodeca? Many thanks in advance for any help.
@Carapau,
Sorry for the slow reply.
If you’re using Copter-3.6-dev (dodeca is not include in Copter-3.5.x) then you can just load any multicopter binary (i.e. Quad) and then set FRAME_CLASS to 12 and reboot the flight controller and it should be a dodecahexa copter. If you’re using the mission planner, then on the Flight Data screen’s status tab (bottom left) you should see outputs for ch9out, ch10out, etc. now you might need to also set SERIALx_PROTOCOL to 2 (i.e. SERIAL0_PROTOCOL if connecting with a USB cable, set SERIAL1_PROTOCOL if connecting using a telemetry radio connected to the flight controllers’ Telem1 port, etc) and reboot the board to see those higher level outputs.
Dont worry about the slow reply as I am sure you are busy. Your help is really appreciated. Thank you.
Gosh I wish I’d read this thread more closely before I flipped my copter over! My fault, should have realized it wasn’t responding right but I couldn’t figure out what was wrong. Initially I was using Main 1-6 and Aux 1-6. I figured out that I needed to change it to 1-8,1-4, but I was caught off guard by the motor order, although I could see that the motor test was wrong, I just assumed maybe those designations a,b,c etc rather than 123 were not updated since it was a new frame type. The motor ordering has, in the past, coincided with the PX4, any reason this is different? Perhaps I’m forgetting that AC can be loaded on several controllers, while Pixhawk can support PX4 and AC… Not directly related though… Hmm. Any way thanks for the info and all the hard work.
In the future I’d like to know how to verify motor mixing info and servo out to motor mapping or whatever that’s called. I assumed “33” motor 1 for example, would always correspond to the right motor on a hexa, and didn’t realize they were sort of arbitrary. But obviously they must be because I had to put incorrect motor numbers in my servo out params to correct the motor wiring problem I had when going from PX4 (which I couldn’t get to work by the way- only top motors would spin) to ArduCopter. Anyway where is this information saved? It’s in the firmware right? Do I need to download the source and everything in order to read that and change it if necessary, or is there a quick way I could do that if I needed to say… Remove yaw mixing for a v tail, or make a custom airframe?
I know this is long thanks and sorry!
I didn’t see it in the release notes of 3.6, so I assume that dodeca hexa did not make it into 3.6?
I do not use 3.6 yet but DodecaHexa is documented in Wiki:
Frame class is 12 and fonction of Servo 9 to 12 can be assigned to motor 9 to 12.
Marc
The dodeca-hexa copter made it into Copter-3.6 and has been flight tested by Altigator (an ArduPilot partner) so it definitely works. I’m hoping/planning to get the wiki updated to add the wiring info. the motor output connection order is actually easier/better than it is for most frame types. It’s front-top motor is #1, front-bottom motor is #2. right-top motor is #3, right-bottom motor is #4 etc.
finally got some time to implement this on my dodeca hexa: as I have 2 front-top motors (a left and right top and bottom and only 1 side if you understand what I try to say) I start numbering following the clock: right front top #1, right front bottom #2, right top #3, right bottom #3… to end with left front top #11 and left front bottom #12… is this correct? many thanks
