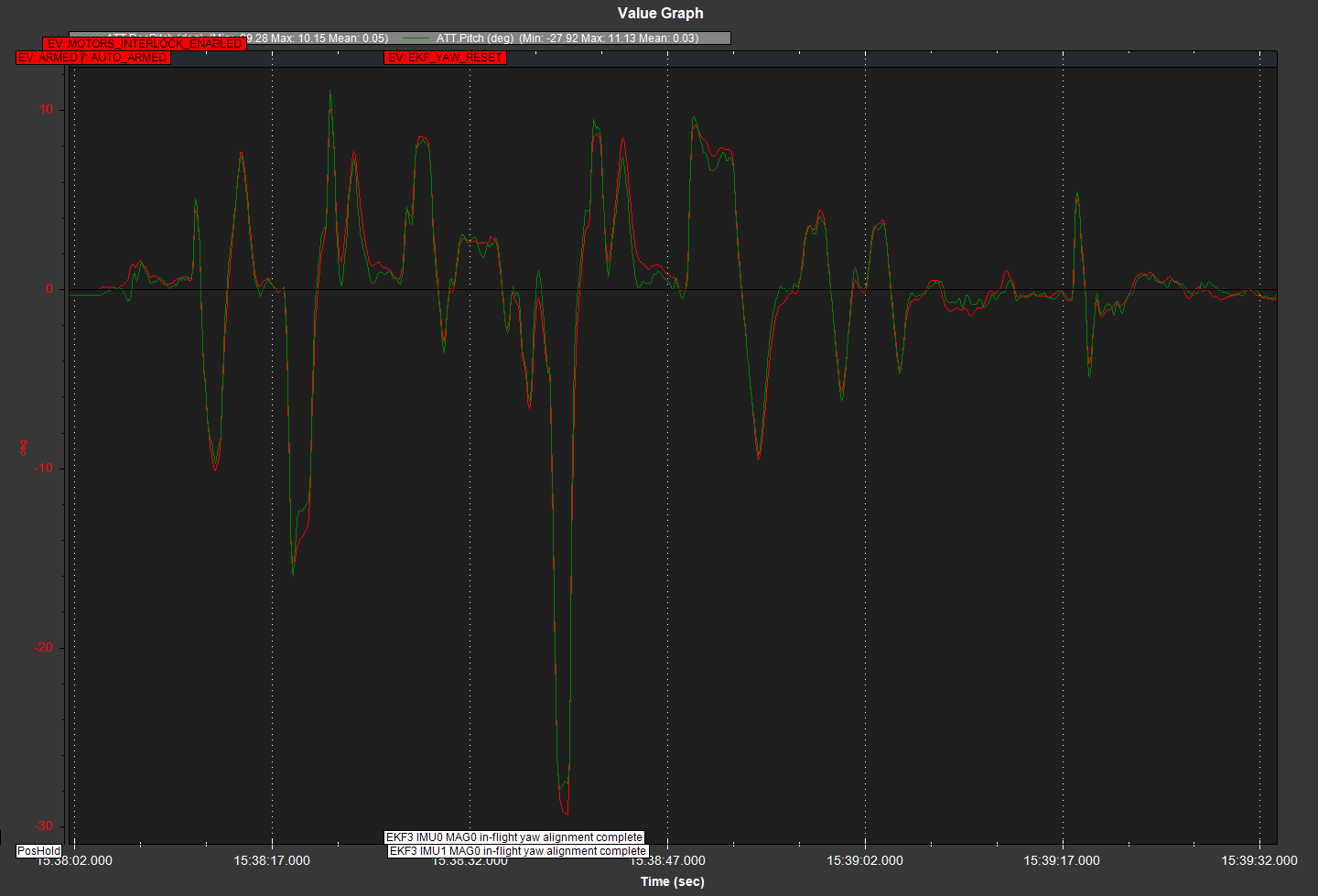
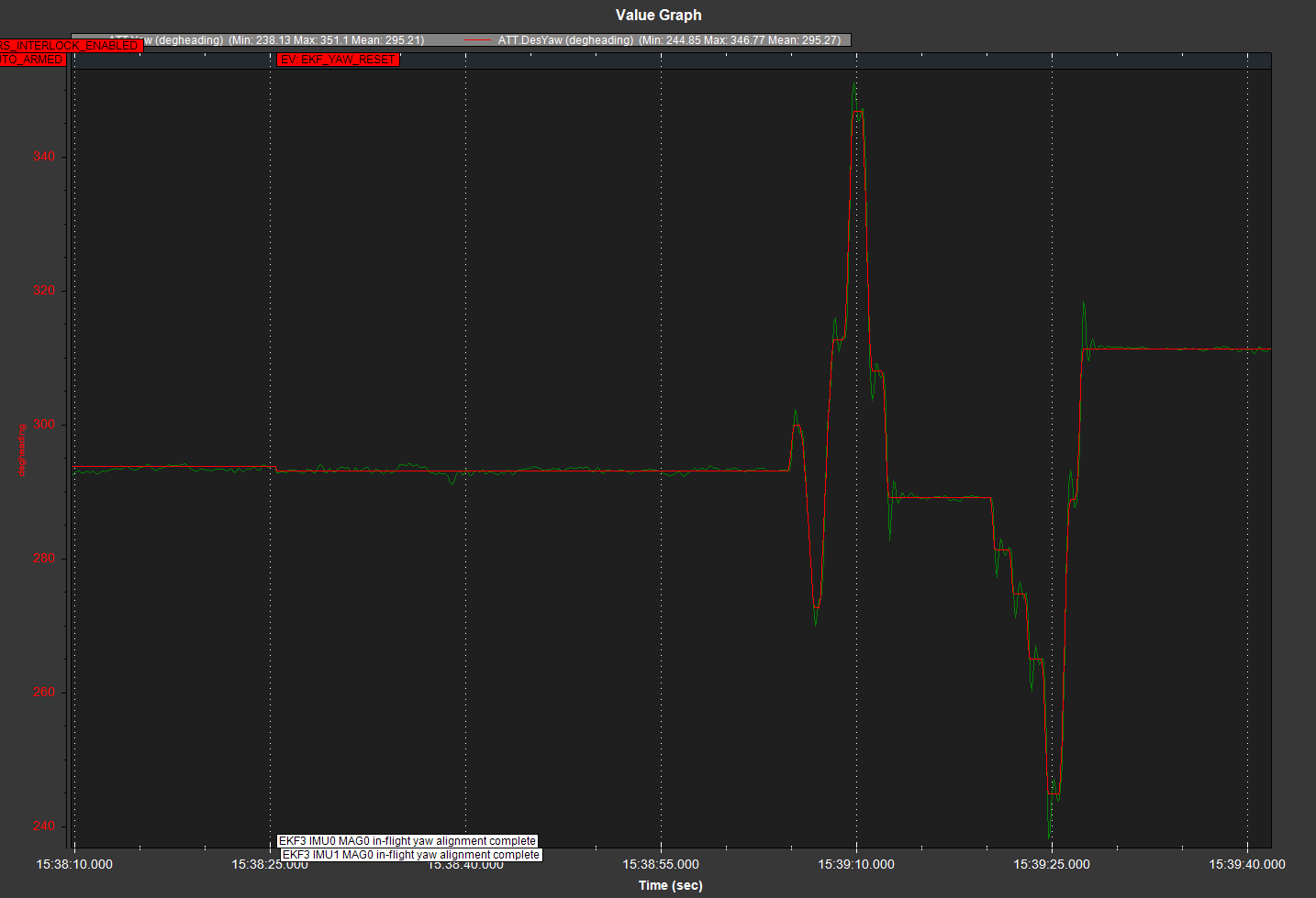
Do these yaw, roll ,and pitch (all plotted vs. desired) suggest that tuning is needed? This is for a quad that ive tilted the motors 5 deg circumferentially for increased yaw authority, and on the maiden tuning flight (as per the tuning instructions: Tuning Process Instructions — Copter documentation).
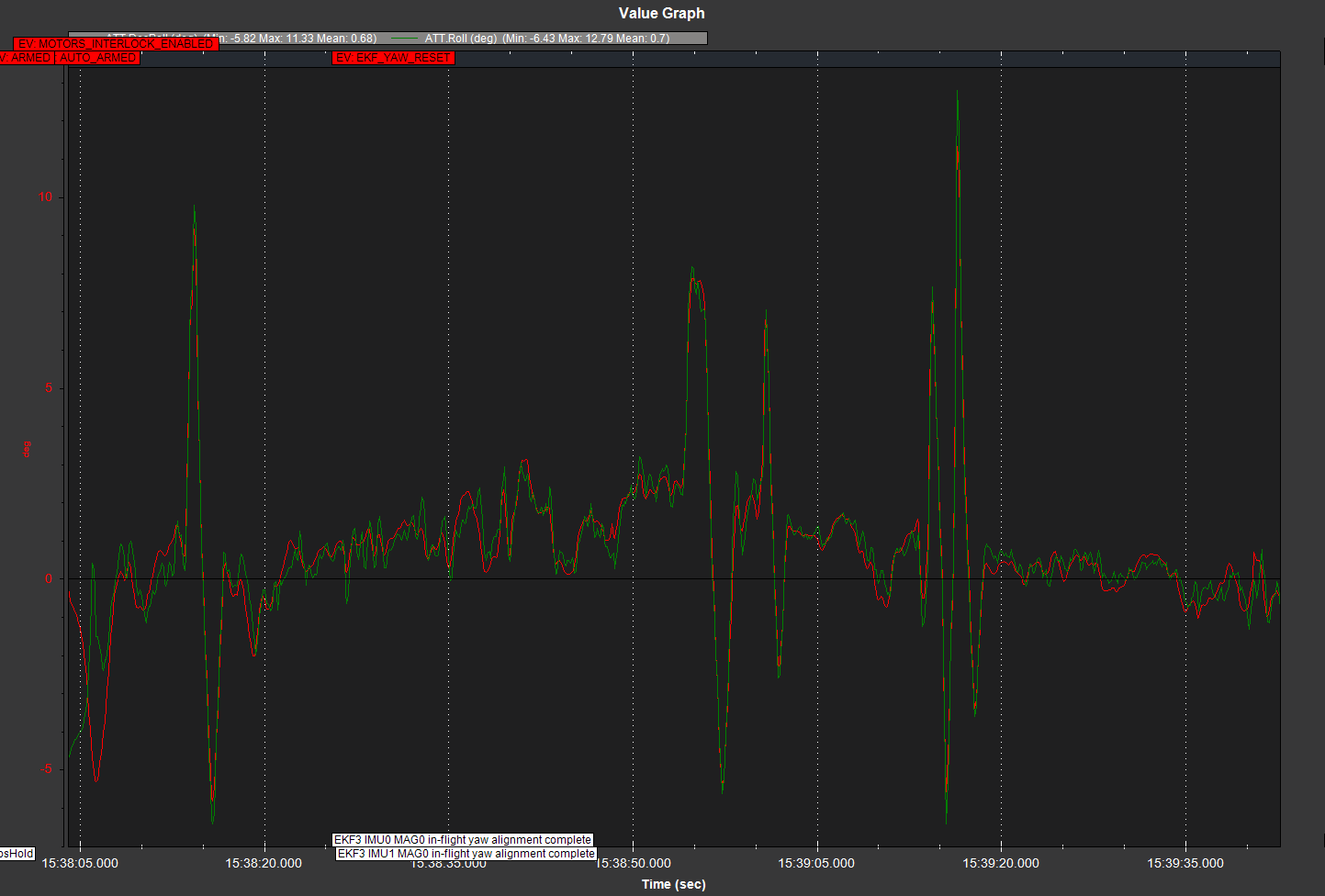
Roll doesn’t look good. You want to look at Rate Rout, R and R des.
1 Like
perhaps i have some high frequency error that could be cleared by the in-flight fft filter? vibes are good, < 10.
Yea, I would configure the Dynamic Notch Filter and then either some manual tuning or give Auto Tune a try. You have a choice of throttle reference or FFT. I would go with FFT and see how that shapes up.
1 Like
Also I do have long, flexible landing legs. Could this be causing issues? Will try out FFT tomorrow hopefully and report back.
Possibly, that has been seen before.