@Allister I am running an auto mission with old Pixhawk FC to drop a buoy in the ocean.
As I understand from the documentation, a “Do_Set_Servo” command is required between two waypoints (in my example below, WP 2 & 4).
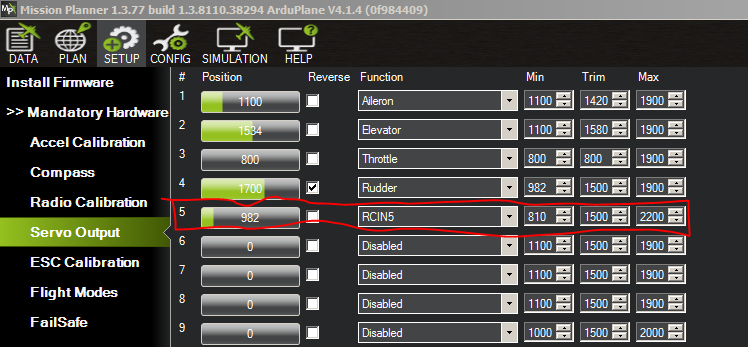
I am using the main channel out pin#5, servo_output set to RCIN5.
It will be somewhere between the 2 WP’s but not necessarily in the middle. As soon as one WP command is executed the next one is activated. You would be better off to pick one WP location where you want it dropped.
Edit-Sorry, I didn’t notice this was a Plane thread.
I tested the “Do_Set_Command” in auto mission mode and it did activate the servo after the waypoint. Here are the two videos I uploaded on my channel. In the 2nd video (flight log) below the plane had drifted due to high wind 20knots+