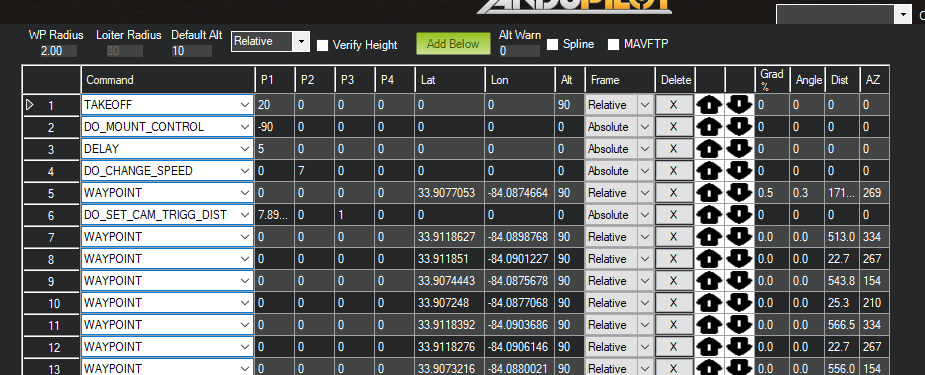
I’d like to test the do_mount_control waypoint to do something fairly simple - angle the gimbal down - say 45 degrees.
This is something I need to do for a real mission.
As I can best understand from the parameters for this command as listed in common.xml, I’d need to use the first parameter to set the pitch, and the seventh parameter - to either “3” for RC Targeting, or “2” for Mavlink Targeting. (not sure which)
Unfortunately, the units and positive/negative associations aren’t listed anywhere I can find for the “pitch” (first) parameter.
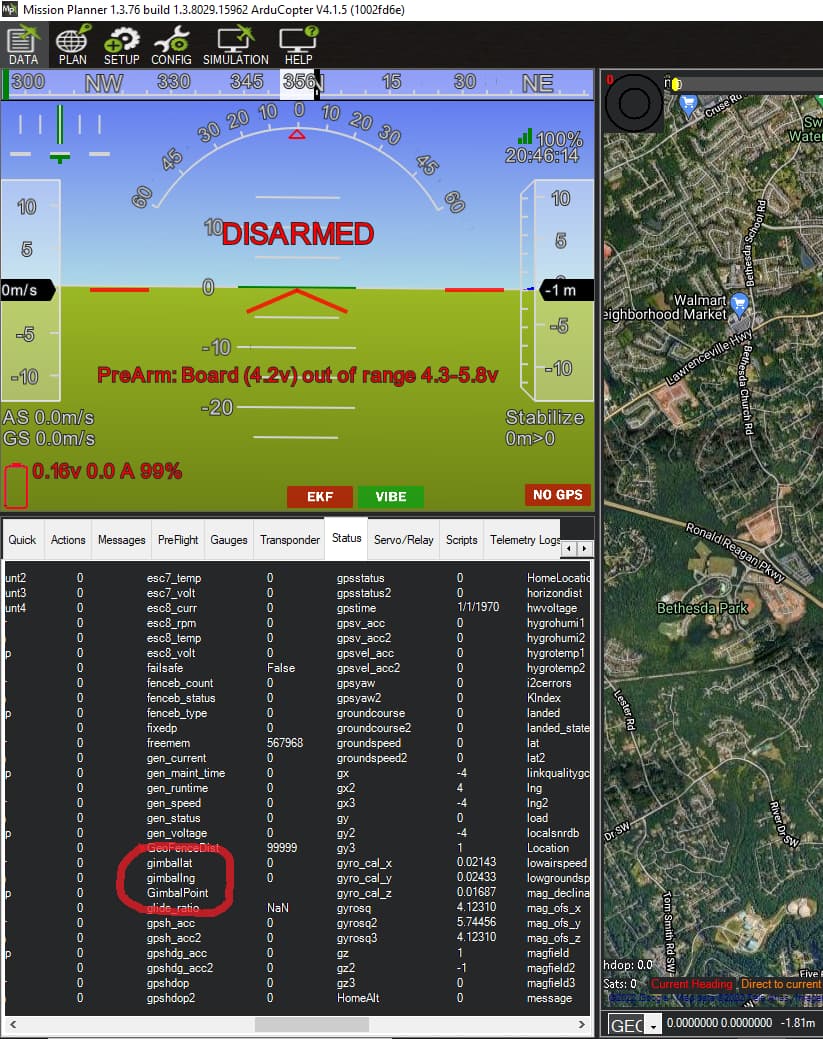
I thought this would be a perfect job the SITL simulator to try our different values (since it’s beyond me to read the source code) - but I’m unaware of anything in the HUD or Status tab that might indicate the gimbal status during a mission.
The closest thing I can find are three values in the status tab: gimballat, gimballng and GimbalPoint.
I ran a mission that has ROI waypoints with altitude assignment - but these values were never populated. I know the gimbal changes pitch for the ROI altitude, because I’ve flown it in real life.
My need for do_mount_control was to be able to point my camera down after takeoff. I found that “-90” worked for that. Its been quite a while - but I don’t remember getting anything in SITL to indicate that this had happened.
do you have a gimbal SITL_Model for RealFlight for a plane or copter that can I use it with Ardupilot mission planer?
I have a gimbal on a plane that running in RealFlight, and I want to control it via Mavlink. Is there a way? Or a form that read Mavlink messages?
Please some help or guidance in this regard.
Thanks