Hello and thak you all for your inputs. Sorry for replying so late.
I have placed the last log when I flew in the following link.
https://drive.google.com/drive/folders/1McUzaZ_ur3zHqk7WBvXOwO5uVVR3N1bo?usp=sharing
Before this flight I supposedly changed only the battery parameters so the drone would not force a landing due to “low battery”.
I really don´t know how to read the log, but this is the late one I got.
When I changed the battery parameters I did it according to the following conversation:
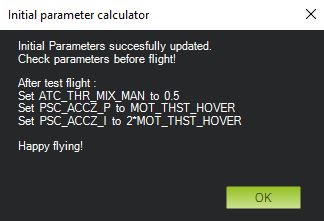
Now, this was after I re-callibrated everything, but after the first test flight (30 seconds) I did not change the parameters as instructed in the Initial Parameters calculator.
I know this is a lot to ask, but if anyone could again give me some advice, I would really appreciate it.
I have fixed the dron and I plan to re-callibrate everything and try again, this time making the battery adjustments from the begining.
Thank you!