Hello,
Sorry if this is not the right place to ask, but I am new to this.
I have setup my Pixhwawk 2.4.8 following all the receommended settings but it seems that everytime I fly I need to recallibrate everything. Is this so?
The first time I flew my quadcopter it was wobbling after rising a few centimeters from ground. I ran the initial setup, adjusted the battery to 3S, props to 10 inches, and loaded the info on the Pixhawk. The drone was stable, but would RTL after 30 seconds of flying. So this time I checked the battery settings because it seems the failsafe was triggering in and changed ONLY that, but when I tried to fly it again, it started wobbling again. I wanted to see how long the battery would last this time, so I pushed the thottle just enough so that it would barely touch the groud, but it suddenly went crazy, flew away without control and after I tried turning the throttle down and disarming the drone, it crashed.
So I wonder if everytime I need to fly it I need to run the full callibration procedure. If anyone knows, please let me know.
Thanks.
No, you only need to calibrate once. After that it’s done. Only need to recalibrate if you change a component other than the battery
post a bin log from the flight, it sounds like you have not configured or tuned the machine properly.
From your description you haven’t performed any tuning. The Initial Tune Parameters are a one time pre first flight step to prepare for that.
Hello and thak you all for your inputs. Sorry for replying so late.
I have placed the last log when I flew in the following link.
https://drive.google.com/drive/folders/1McUzaZ_ur3zHqk7WBvXOwO5uVVR3N1bo?usp=sharing
Before this flight I supposedly changed only the battery parameters so the drone would not force a landing due to “low battery”.
I really don´t know how to read the log, but this is the late one I got.
When I changed the battery parameters I did it according to the following conversation:
Now, this was after I re-callibrated everything, but after the first test flight (30 seconds) I did not change the parameters as instructed in the Initial Parameters calculator.
I know this is a lot to ask, but if anyone could again give me some advice, I would really appreciate it.
I have fixed the dron and I plan to re-callibrate everything and try again, this time making the battery adjustments from the begining.
Thank you!
1st, delete all the text from the Auto Analysis as it’s irrelevant and it will make your post easier to read.
2nd, identify one (1) log out of that long list you want reviewed. We are typically not going to open and review multiple logs looking for a problem.
Thank you. I have deleted all logs except last one.
I hope it is easier to understand now.
Hard to make much of this log. The Z-vibration levels are off the chart with >1000 clipping events. The motor outputs are oscillating badly and the battery is sagging to <8V.
Start with the battery, something is wrong there.
The vibration levels have to be addressed. What frame is this and how is the Flight Controller mounted? Props balanced?
Set these as you will need them later:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Hello Dave,
I just wanted to thank you for the support. Last Sunday I was finally able to fly my drone for about 5 straight minutes.
I put the log in the same folder as before and I think this time there is a lot more to see, in case you would like to.
Since it was the very first time I was able to fly it stable, I decided just to hover as much as possible and I also tried tested the AltHold and Loft modes.
They worked beautifully!
This weekend I will try flying in circles or squares instead of just hovering, but it was a great feeling to finally see it fly. So thanks a lot!!
Hi Marco,
There is more to see and it’s pretty bad. The Z-vibration levels are way too high. You really can’t advance until this is addressed. I’ll ask again, What frame is this and how is the Flight Controller mounted?
The battery is sagging badly dropping to ~9.5V almost immediately and it wasn’t at full charge when you started.
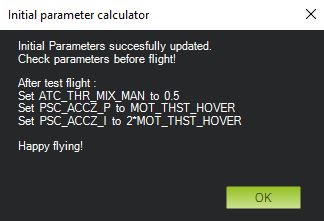
The outputs are oscillating badly so cut the Rate PID’s in half and set these parameters:
PSC_ACCZ_I,0.34
PSC_ACCZ_P,0.17
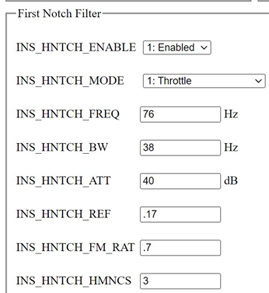
Set these Notch filter parameters also. You will have to revisit this after the vibration levels are reduced.
Hello Dave,
I am using an F450 frame with an Ovonic 2200mah 3s 11.1v 35c lipo battery. The motors are some low cost A2212 1000kv with 30A low cost ESCs. They came in sets.
The flight controller is a Pixhawk PX4 Pix 2.4.8. I am attaching a picture for your reference.

I made sure the battery was full, but originally I was having issues with the fail safe kicking in too soon. I tried 3 different batteries first and it was the same. Then I changed some parameters and the fail safe issue was corrected. I don’t know if it could be related to the quality of the parts I bought as I got the kit online, but at first I got the impression there could be a voltage drop between the battery and the voltage the PixHawk was getting. I would need to confirm, but I am not sure how to. Maybe using a meter at the battery first and then at the tip of the power module.
The Pixhawk is mounted on its anti-vibration frame. The GPS antenna is held to the F450 frame using only two of the four screws so it leaves a gap and the stick doesn’t hit the PixHawk, but I don’t think this is causing much vibration.
Before next flight, I will set the parameters as you mention and try again.
Thank you.
You have a bunch of low quality parts there typical of most F450 kits. Those motors with collet prop adapters are really not suitable for a multirotor. Did you at least balance the props?
Did you calibrate the voltage monitor?
Hello Dave,
Thanks again for the recommendations. I was able to calibrate the voltage monitor and to cut the Rate PID’s.
However, when I tried to change PSC_ACCZ_P to 0.17 I got an error saying it was out of range, so the lowest I could set it was 0.21.
For the notch filter parameters I was only able to find the INS_HNTCH_ENABLE paramenter but the rest did not seem to be anywhere on the list, so I have not changed them yet, as I did not know if it would affect negatively changing only the first one.
I will log the flight again. I will also try balancing the props later.
Is there any recommendation you would have for better quality motors and ESCs for a drone this size?
Since this is my first one, I just bought what was available based on an online course I took. But I obviously want to get better at this.
Again, thanks a lot for your support!
Ignore that and set it anyway. Ignore all those warnings when encountered
You you need to enable that and refresh the parameters for the others to populate.
Hello Dave. Thanks a gain for the advice. I think I found one of the causes of the big vibration. It seemed to come from the stick that holds the GPS. It used to get loose after every flight, so I removed it and placed the GPS on the base of the power distributor plate. I also callibrated the props. Two of them required calibration. I did a short flight this morning. I placed the log in the following link.
It would be great if you could help me see if there is less vibration now.
I also changed all the notch filter parameters you recommended,
Thank you very much!