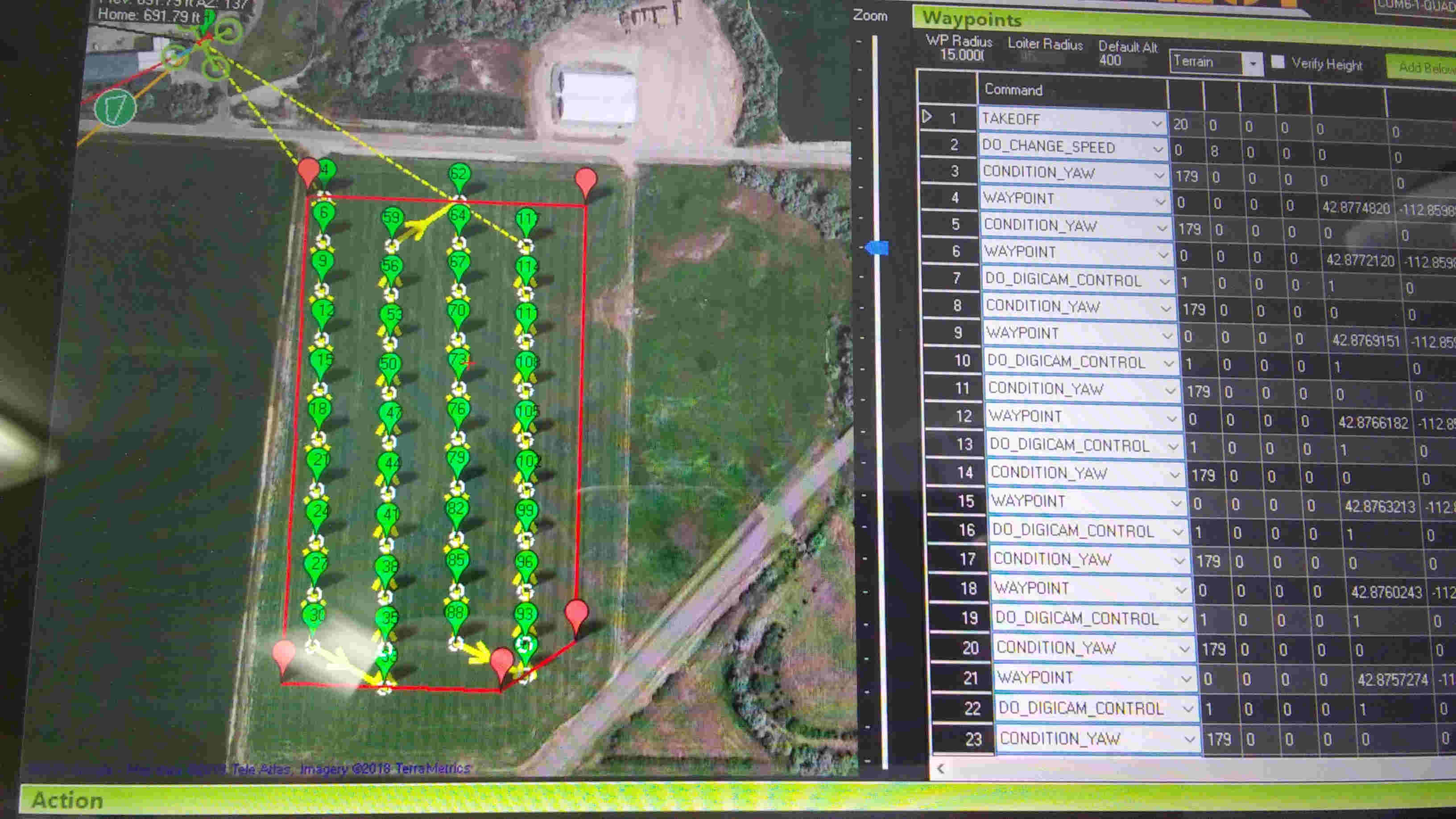
Hello, i normally use cam trig distance as the way to send triggers to my camera during a mission, but i wanted to avoid the camera taking pictures while the drone was flying horizontally to start the next row. So i tried changing the trigger method to Do_digicam_control. When i do this it makes a mission different than the the one it displays on survey grid. It is no longer a perfect lawn mower pattern but a zig zag at the ends and the drone flies the zigags. I will try to upload pics.

I think that is just a display issue. the mission will still execute fine
The mission that the drone flies isn’t excuted like the second picture its executed like the first picture when using do digicam control. This is an issue because the overlapping isn’t kept at the ends of the rows when it zig zags. I have overlapping and sidelapping set to 70-70.
