No. Compass calibration is used to produce offsets for local, on vehicle effects. The global position of the vehicle is not a factor. Surely local effects can be introduced during compass calibration but these are unwanted effects and the reason you perform a calibration avoiding them. Like Magfit does.
The Wiki and other comments about GPS position required is a conflation of declination with calibration. It needs editing.
Thank you both for your explanations.
I have a list of edits for the ArduRover wiki that I plan to edit. As I gain more knowledge about ArduPilot and find more time in the future, I will make the edits. Currently, I’m lacking the knowledge and time to do so.
I just expecting an answer yes or no, as I can’t “digest” the long reasoning. So, users can do this onboard compass calibration process INDOOR as shown in the image with the external GPS module mounted (example Here 3, Here 3+ or M9N) and set as first priority?
Can user expect the same flying experience doing this onboard compass calibration indoor and outdoor?
Thanks. Understood. I’m having trouble calibrating both internal and external compasses. Today I will set the external compass only, and leave it at that.
I was proceeding as directed by Yuri in selecting the external compass as primary,
I do do the compass calibration outdoors, I will try again again today. Just to recap, the reason this compass issue started is that when armed in MP the nose or front of the drone is pointed in one direction, yet the lines drawn on the map of mission planner are about 90 degrees off counter clockwise. I’m trying to understand what went wrong.
Because initially a month ago when I went armed for the first time, the lines matched the direction the drone was pointing. What happen since then I don’t know.
As far as gps lock on compass cal, I’m just following instructions I see here.
Thanks,
Rick…
HOMELAND SECURITY
SAT COM V14.2.2
Secure Encryption 58.1
I usually do the initial calibration indoor and then make a Magfit flight.
The only thing I see in this thread is you manually reset the compass orientation parameter back to default as directed. Perhaps the Yaw 270 was set from a previous compass calibration for a reason. In any case a new calibration should sort this.
Post your parameter file, let’s see what you have now.
I slightly certain that that 270 crossed my field of view during the first couple of test flights. This is why I let my younger friend help me he’s pretty sharp, considering he is a commercial airline pilot. Because of issues from being on active duty , my concentration and acuity has diminished recently.
Christian has help me take a logical Analysis of the issue at hand, and work through it. Since he flys for 2 weeks, then he goes home for 2 weeks, I’m limited in the amount of work I can do on the quad. I keep him up to date on our messaging, and he uses that data to continue.
We want to finish completely with this first system and use what we’ve learned to build a true heavy lift platform.
Thanks…
Rick…
The reason GPS lock is recommended that ArduPilot looks up the local magnetic field strength, declination and elevation in the World Magnetic Model. It is this onboard lookup that allows you to calibrate your compass one time and not have to recalibrate when you change location.
It does not need to be a particularly good lock because the worlds magnetic field does not change very much, if your within 10 miles or so its effectively constant. If you calibrate with out GPS lock and you fly within that 10 mile radius of where you calibrated then it will be fine.
3 Likes
Is this just for declination? What does elevation do for calibration offsets? I see the dialog on Discord but I still don’t get it.
Hi, author of the onboard compass calibration here. It is 100% incorrect that you would need to redo mag cal on location change.
GPS lock is required to perform the large vehicle calibration as it allows the aircraft to look up the current location in the WMM.
However, once it has been performed correctly, calibration never needs to be redone unless something has been magnetized on your aircraft or your magnetometer has gone out of calibration, for example by having been exposed to very strong magnetic fields.
Getting a correct declination at a new location requires a GPS lock. This is done automatically and does not require any manual action such as calibration.
If confident in your magnetometer calibration, it is a risk to redo it, especially with the large vehicle cal as there are no guardrails against local magnetic fields, something that the onboard cal does by checking the mean squared residuals on, IIRC, 300 measurements.
I understand the reason for requiring GPS position to obtain declination. What does it achieve for compass calibration/offsets which from what I understand is to correct for local/on vehicle effects.
Nothing unless you are performing the large vehicle cal, which fundamentally works by trusting that a single measurement of the local magnetic field is uncorrupted by external magnetic fields other than Earth’s.
…
Thank you. I think the Wiki deserves a bit of editing on this point but I suppose it’s academic.
Can you help explain the purpose of this section then? Why are we setting scale factor based on WMM if it has no effect?
I don’t think this method applies solely to large vehicle cal.
Sorry if I did not articulate myself well. I was trying to say you would need to re-do your calibration on location change if that calibration had been done WITHOUT GPS lock in the first place.
I still don’t understand why that is if we are talking about calibration not declination. I surely could be wrong about this but I have asked this question before, last week in fact, and did not receive an answer.
I’ve been studying the mag cal code for a bit and had some discussion earlier with Pete, so let me give it my best go:
WMM contains more than just declination information, and we use expected field strength to set the scale factors to account for local effects, such that the calibration should remain valid worldwide.
If I am wildly off base here, I would love to know why. If I only mixed a few technical terms, I’m happy to be corrected, as well.
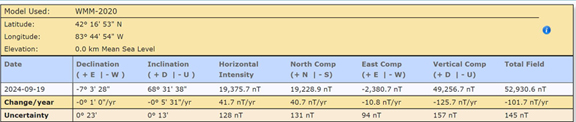
Right, it contains this information:
This has really gone off-topic. A new topic with a proper title would be usefull.
1 Like
I have a correction for my earlier statement: having a GPS fix allows a later addition to the onboard compass calibration to function, which additionally calibrates the overall scale factor of the magnetometer based on the WMM. So yes, having a GPS fix will improve the onboard compass cal as well, in a relatively minor way.
Not having that scale factor would have no impact on the need to recalibrate at a new location.