TL;DR
1.Still very poor loiter
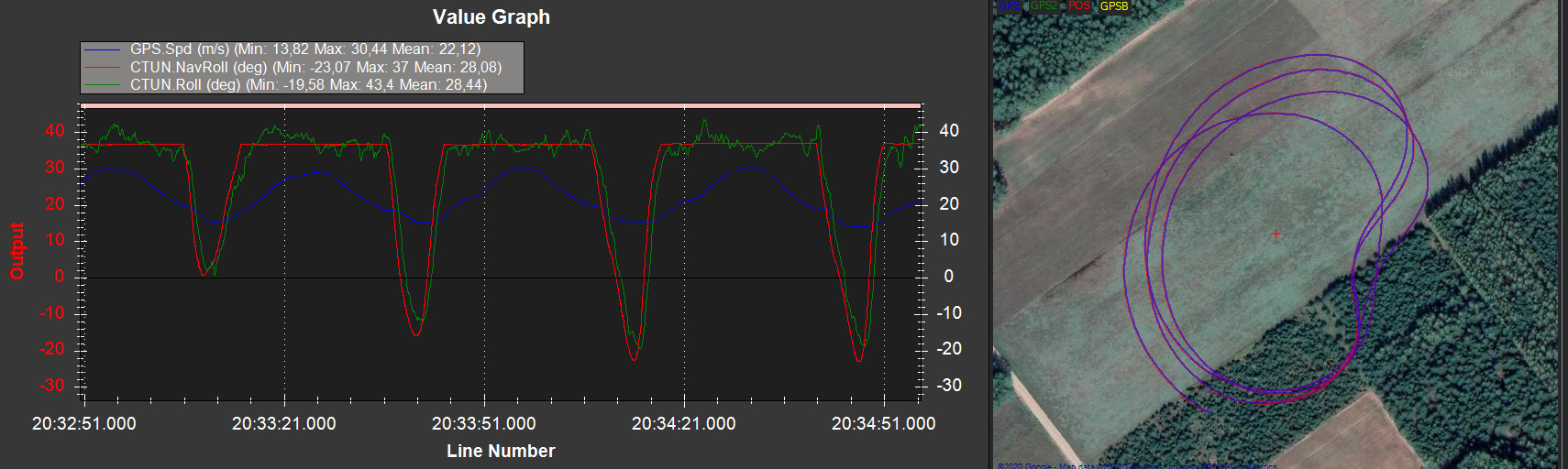
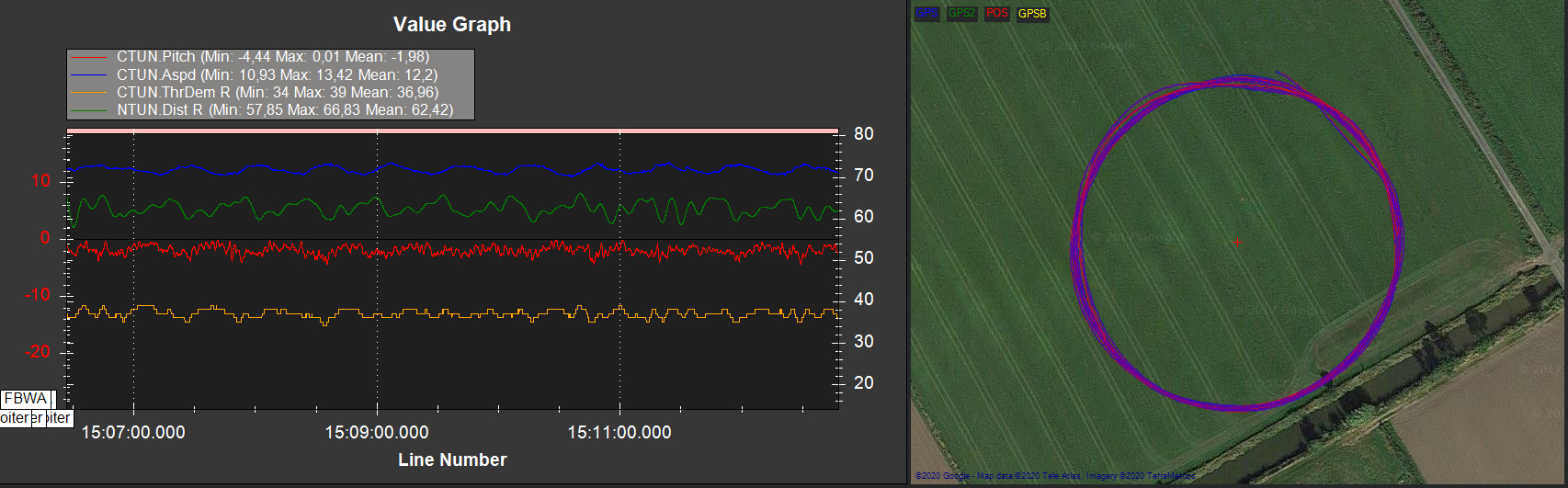
2.Roll limit defined to avoid stalls, but loiter radius increased and similar patterns easily flown in FBWA at a lower speed, but…
3.By far too fast in LOITER
Despite making several corrections and adjustments the problem is still there: the drone flies well in the FBWA mode but there are serious problems in LOITER.
In particular, it commands huge throttle level, speeds up well above the FBWA_MAX_SPD, and does not follow the circle navigation patterns.
I’ve increased the loiter radius to 82 metres. The loiter direction is clockwise. The roll is limited to 37 deg as the plane had the tendency to accelerated stalls.
I’ve enabled the separate left and right motor controls channels. In order to prevent stalls, I’ve added some -2 m/s vertical speed in unpowered flight, but it should not have any significance here?
The powertrain is 2xSK3 9x6 propellers, 4S voltage. Now I have extensive pre-arming checks, I’ve replaced the GPS and added and external compass.
I’ve flown two flights.
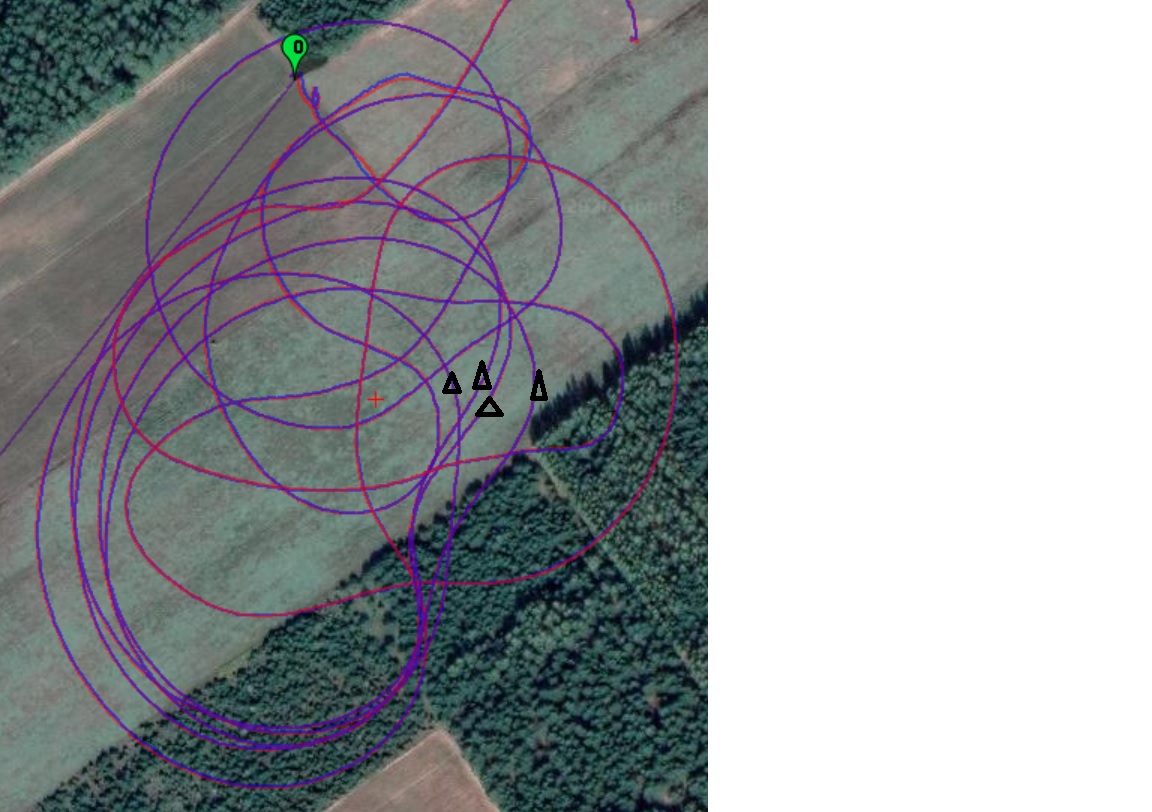
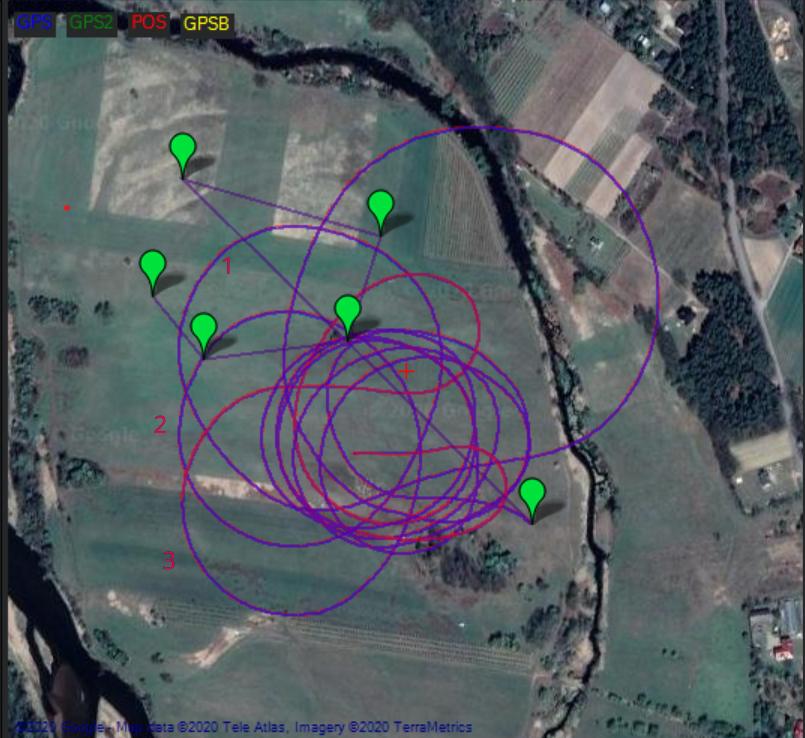
FLIGHT 1:
-wind hardly noticeable
-when switched to LOITER, first it went into two anti-clockwise rounds, distorted and with too big radius (1,2)
-then it made a sharp turn probably to enter the clockwise direction (3), I’ve stopped here because I was worried that something went completely wrong. But it has demonstrated that it can perform a relatively tight turn.
-the average throttle level was around 60%
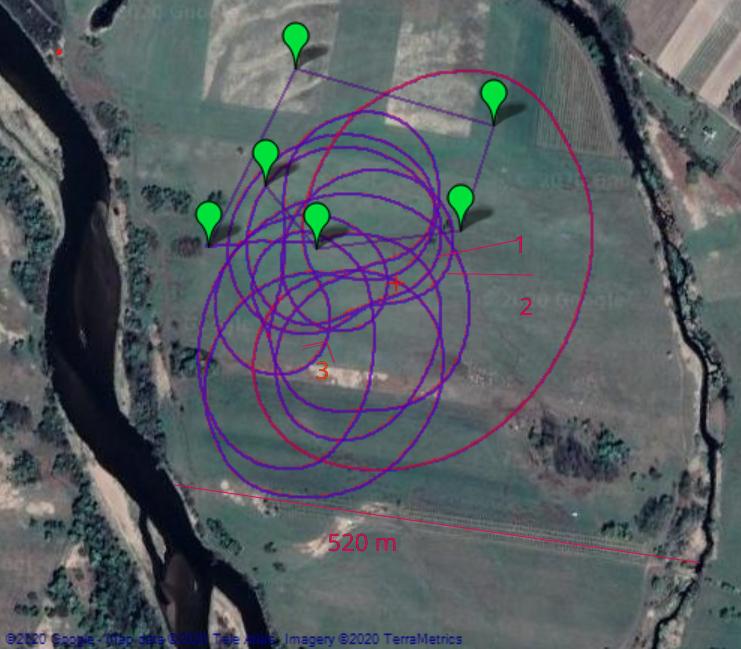
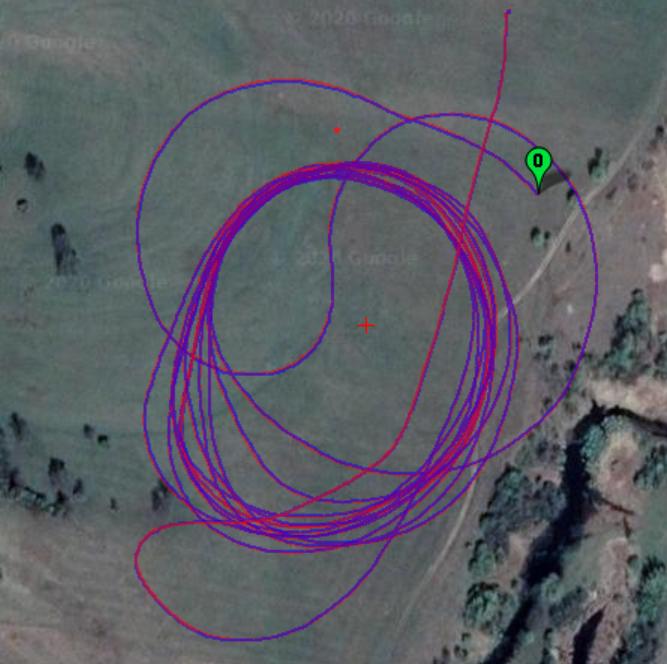
FLIGHT 2:
-wind light (~2 m/s), no gusts
-I’ve increased the NAV_L1 constant from 16 to 23
-the average throttle level was way above 80%
-the plane has flown only clockwise patterns. After selecting LOITER, first it went on a huge turn. Did it want to get into the loiter pattern?
-and than it has made three rounds (marked as 1,2,3 on the track) being pushed downwinds. I’ve quitted when I’ve noticed that it’s not holding the loiter center.
-then I’ve flown several circle-shaped patterns in FBWA, with much lower speed and throttle level.
Some thoughts and questions:
-why the speed goes above the FBW_AIRSD_MAX? Is there no airspeed limit for LOITER? It looks as if the controller was “panicking” and pushing the throttles “to the wall”.
-why there is such a difference between average throttle levels in the two flights? The RC3 (throttle channel) was first slightly above 1500 and than around 1400 in the flight 1, and somehow higher (above 1600) in the flight 2. But even the flight 1 was too fast. In earlier flights, the problem was happening even with the throttle channel RC3 reduced to minimum.
-there seems to be no proper navigation, it just commands the maximum roll. Then it goes way to fast because of commanding too much throttle.
-is the THROTTLE_MAX set too high? Probably yes, but I want to have some margin in case of stronger winds, and I need it for takeoffs in FBWA and TAKEOFF mode (maybe there should be a separate throttle max parameter for TAKEOFF?) - EDIT! There is already! TKOFF_THR_MAX
-I can’t see any rudder action, is there any? Could this contribute to the problem?
-the airspeed estimation in TECS is a constant 16 m/s. Is this fine?
-I don’t think there is a signifant nose up/down tendency from the motors, they are mounted relatively low compared to the types with the single motor on a pylon. The motors have an outward rotation direction to avoid the propwash hitting the elevators.
In response to the first answer in this thread, I’ve setup the loiter radius above what was computed there, but there is still no correct loiter and some turns can be much tighter than that, if the airspeed is not skyrocketing.
When I was trying AUTO some time ago, the problem was also massive throttle shoots in turns.
TECS_RLL2THR? The banking angles are relatively limited…
I have never had similar problems with my other builds, which however were single-motor, not V-tails, and slower, even if not necessarily smaller (Powerzone 2600). I would want so much to get nice circles on the map 
FLIGHT 1 log
FLIGHT 2 log