I am building a 6 wheeled skid steer robot, has a CUAV X7 autopilot, with GPS etc with these motors
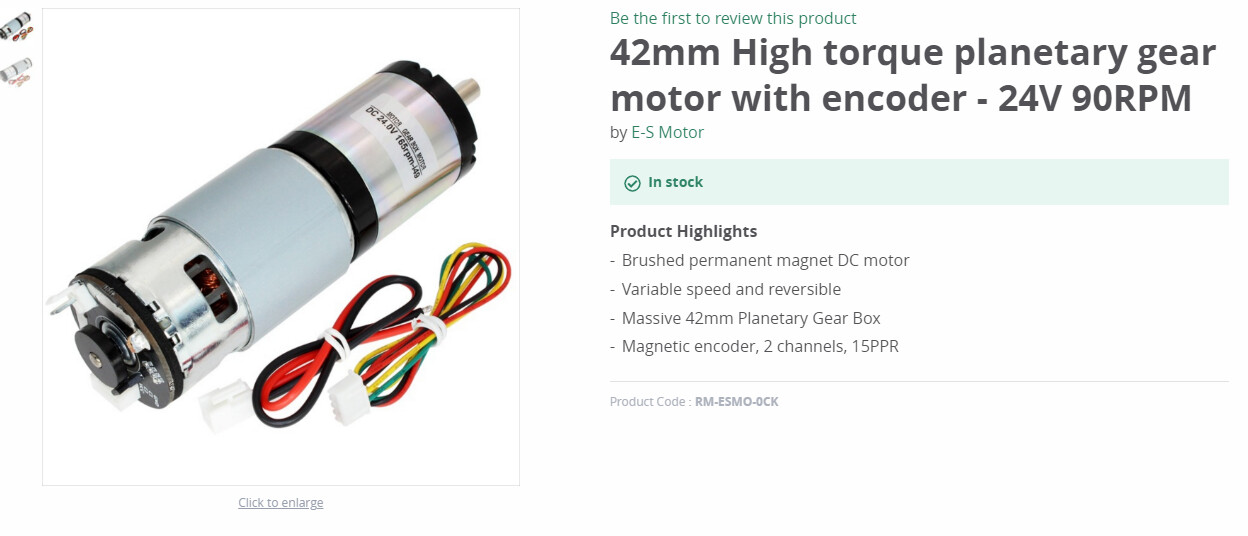
however I will need to know distance travelled when the GPS is under cover …
I had these motors just wired without the encoder function… but just thought perhaps I have one motor with the encoder wires wired like this:
https://ardupilot.org/rover/docs/wheel-encoder.html
Would that work ok to just wire one that way?
cheers