@Allister @Michael_Oborne @dkemxr
Background:
I hand-launched my plane as I normally do, only this time it ricochet off the ground and flew off without any issue. During the flight, I did notice some performance reduction but since I was going to have a short flight I kept on flying (I was testing an ND filter, so my focus was on the image quality). After 3-4 minutes it lost power and control and landed 1000 ft from where I was. It took me several hours to locate the plane and by the time I found the plane, the battery had completely depleted and puffed-up.
Plane was fine but the prop ends had chiped off during the hand launch when it hit the ground. Surprisingly it kept on flying with broken/unbalanced prop.
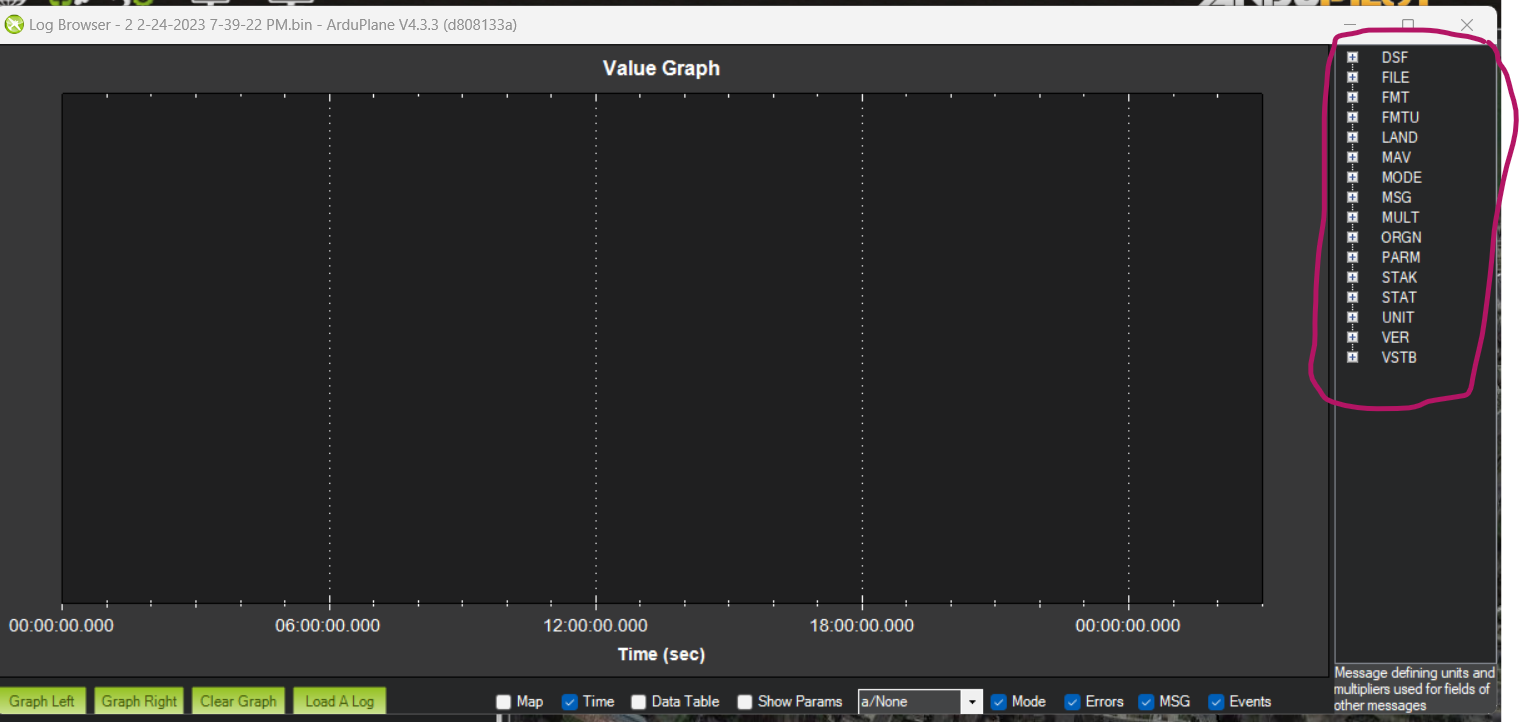
I downloaded the flight log to see what had caused this failure, but got a log file that seems very odd.
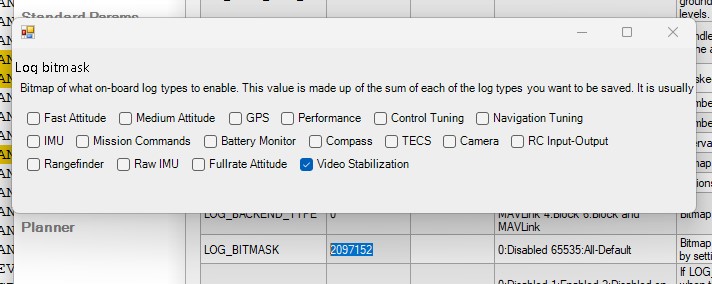
See pic below. It is missing several data attributes such as BAT, GPS, etc.
Also the downloaded log file has a very unique name “2 2-24-2023 7-39-22 PM.bin”
A typically log file name is “2023-02-24 19-26-58.bin” without a starting number and no PM at the end. As shown below as an example:
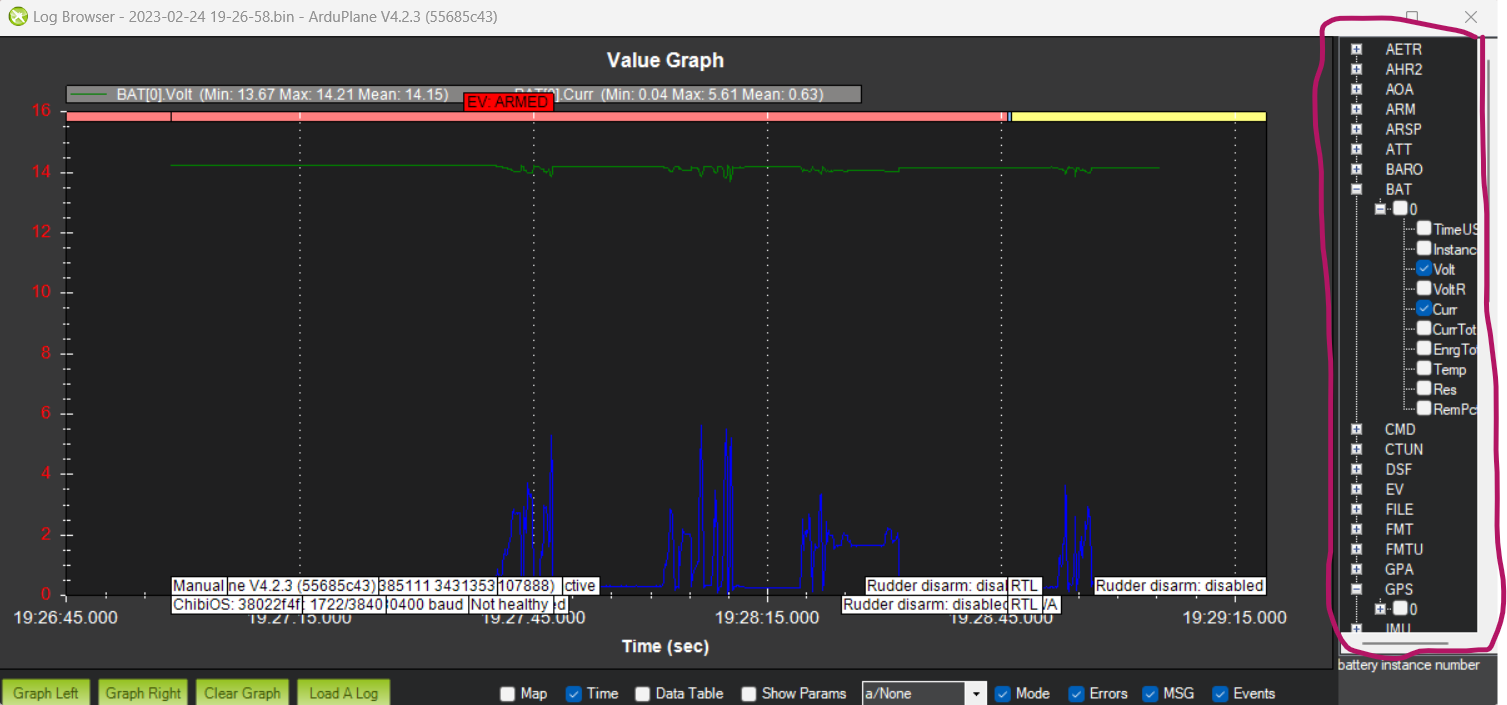
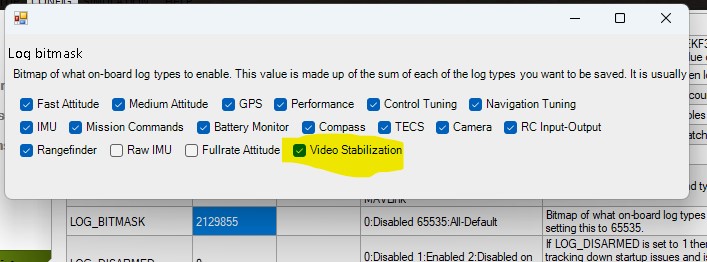
The flight controller seems to be working fine, GPS is positionally good, the plane is arming, but when I retrieve the log file it is missing key parameters as mentioned above.
Here is a sample file after arming at home and moving around the plane in my backyard.
96 11-28-2022 9-31-50 PM.bin (952 KB)
Any suggestions on how to fix this issue?
Thanks.