I’m new to Arduplane and have installed 3.8.5 on an mRo x2.1 (Pixhawk compatible) in my Team-Legit FOHDY 40" wing. I initially used the PIDs given as a “approximate configuration values” in the Arduplane manual for the Telink Torro 900 wing. However I had substantial pitch oscillation, so I reduced PTCH2SRV_P from 2 to 0.8. This solved the oscillation and I then ran autotune but note that it did not change PTCH2SRV_P.
I’m launching by chucking the wing in FBWA mode with a bit of back trim on the elevator. However I noticed that the pitch was gradually leveling off and when I checked the logs I see that my elevator trim is commanding only about a 4 degree pitch angle (CTUN.NavPitch). The actual pitch angle (CTUN.Pitch) is rising to about 16 degrees before gradually falling again. I’m thinking now that the reason why the pitch angle is reducing is simply that I’m not commanding enough pitch - should be 10 to 20 degrees. However I’m not sure why the pitch response is so slow - did I reduce PTCH2SRV_P by too much? But if so, surely Autotune would have increased it?
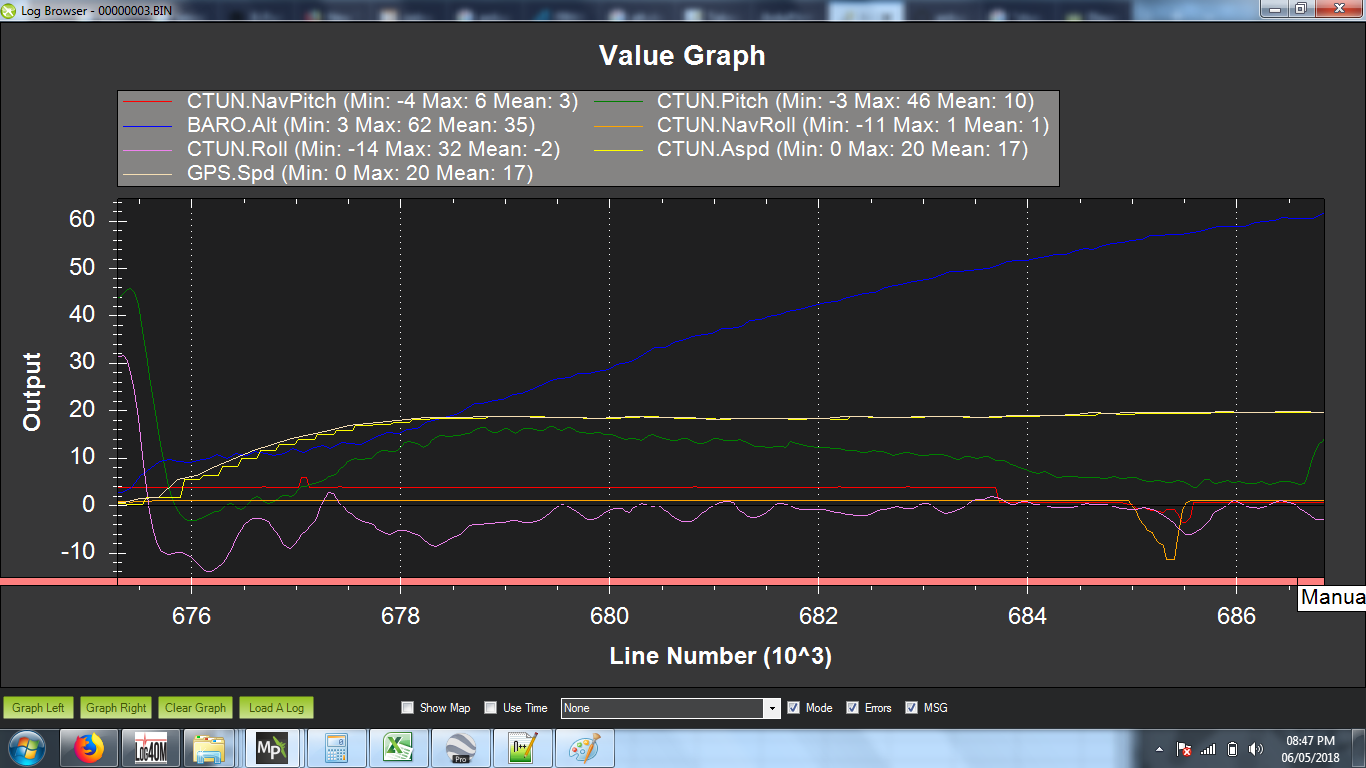
In the graph below, the throw is on the left (at about 675) where the pitch attitude is large. The pitch goes briefly negative but then starts rising and goes well above the CTUN.NavPitch before eventually starting to fall again. The actual aircraft behaviour is not bad, but I would prefer that it occurred through design not chance!!!
Thanks for any help or suggestions you are able to give,
Andrew