Is there a way to disable TECS parameters ?
For example: I want my airplane to be able to descend quicker than the maximum allowed value of TECS_SINK_MAX.
TECS is only active in airspeed and altitude control modes ie. FBWB and above. IIRC wiki describes what parameters to use if you want different envelope in TECS than in FBWA.
As @LupusTheCanine said, the TECS parameters only affect the altitude control modes.
As I said, it would be more than advisable for you to start with a TECS setting. Parameter settings should be “within the limits that physics will allow your aircraft”; although numerically you can set values that your aircraft may not be able to maintain… but not only will this not be achieved, it will conflict with other aspects of flight.
3 Likes
My goal is to achieve high climb and descent rates in Guided mode (I assume TECS is active in Guided mode).
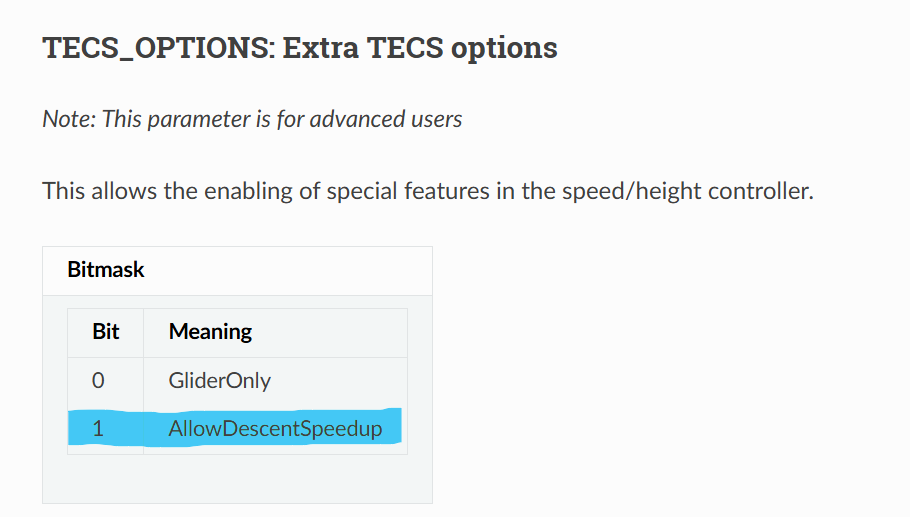
So what I have to do is change the TECS_OPTIONS setting ?
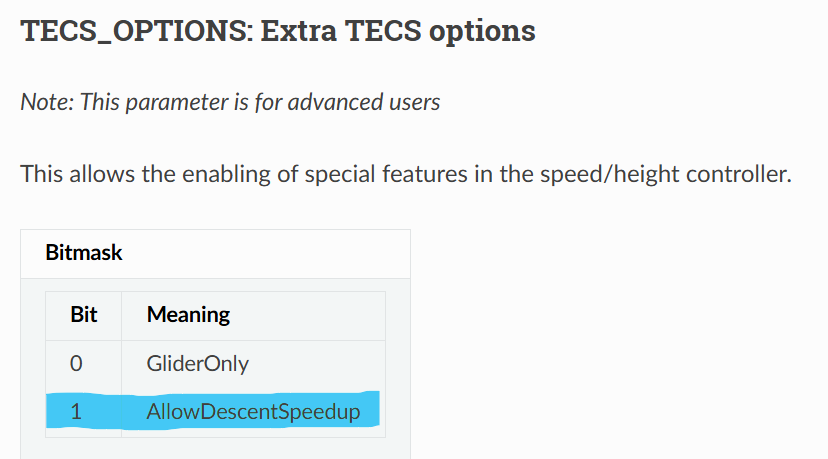
As already mentioned, you cannot change the physics of your aircraft (e.g. maximum climb rate without stall, maximum descent rate without overspeed) with the TECS parameters. The TECS parameters are used to enable the best possible control of altitude and speed according to the performance data of your aircraft.
Rolf
I don’t understand what suggest in my original post that I’m trying to change the “physics of my aircraft” with TECS… ![]()
My aircraft has redundant power and enough structural integrity to fly at the rates I want.
So I’m asking how to enable it on the autopilot side.
For example:
I want to descent at 30 while still flying in Guided mode.
What’s the recommended approach to achieve that ?
Tuning the TECS system.
https://ardupilot.org/plane/docs/tecs-total-energy-control-system-for-speed-height-tuning-guide.html
It’s a bit of a process and takes some time, but if you want to get the best performance out of your plane it’s worth it. Things will probably go better than if you just try to work around it.
1 Like
@Allister,
I saw this page before posting and I don’t see how it can help me.
I need to achieve a performance characteristic that limited by a TECS parameter - so I don’t see how “things will probably go better” if I don’t work around it.
I think that @Lano’s suggestion is what I need. I’ll try it in SITL.
If your plane is limited by the parameters, it means the system isn’t tuned or configured fully. Besides the one objective you have, you’re probably be limited in other areas as well. If you tune the system to match the performance of your plane you will have increased overall performance, and meet your objectives.
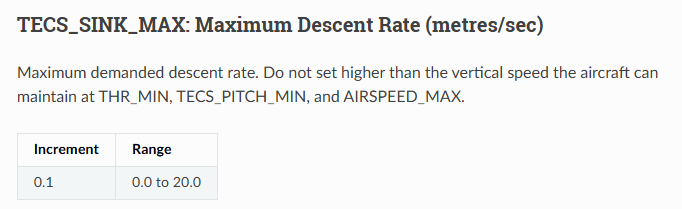
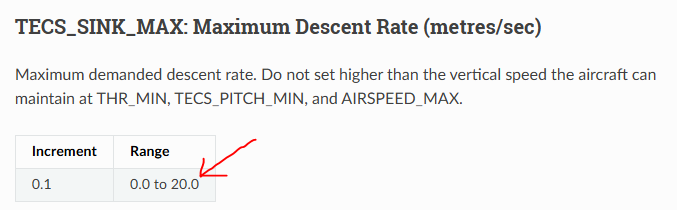
This is from the documentation:
Yet you keep saying:
If your plane is limited by the parameters, it means the system isn’t tuned or configured fully.
With a hard limit TECS_SINK_MAX < 20, how can it be logically possible to “configure fully” and achieve a descent speed of 30 m/s ?
There are no hard limits in Ardupilot. You may get a warning that you’re exceeding a range, but it will still let you set it.
I have to say, I’d love to see a plane sinking at 100km/h. Are you planning to fly it straight down? What kind of plane is it?
1 Like
Prior to posting I tested in SITL and saw that the pitch was limited by a TECS parameter.
As soon as I changed the parameter it was able to achieve the pitch angle that I wanted.
However, with the descent rate, what I need is above the maximum TECS parameter limit.
It’s my understanding that the TECS parameters change the behavior of the control loops. And they don’t just cause a “warning that you’re exceeding a range”. Their behavior is similar to an electronic limit on a passenger car that prevents exceeding a certain speed limit.
As @Allister stated before, you can set your TECS parameter to any value. The shown limit is just a help, a suggestion for 99% of all cases.
If your aircraft is really able to go straigth down with max throttle and if it can still be recovered with maximum elevator without any single part damaged, then that may be your TECS limit.
I hope you’re aware of the risk not only to your aircraft during such maneuvers.
1 Like