So far I have made hundreds of flights in mountains above 5,000 meters without problems, with ascents and descents that have even reached 2,000 meters between the lowest and highest points, however a few days ago, the difference between the flight altitude (baro) and the real (gps) has varied by 60 meters on a 600 meter ascent.
This has caused a collision with the mountain, the first event of its kind in more than two years without problems and hundreds (if not thousands) of flights.
I have reviewed many logs and it is the first time that the difference is so great between both instruments.
Do you have any recommendations to fine-tune the reliability of the barometer? Would you recommend using GPS data for altitude? Flight with GPS as altitude source is safe? External and more reliable barometer?
I attach the log for your review.
Being the first time it happens and being the first drone with firmware 4.2.3 that I use… I am left wondering if the firmware is related to the event.

A barometer can be significantly impacted by wind. So if it was a windy day when cash happened or there was a lot of thermal activity near the mountains than it is hardly surprising you had issues with the readings.
GPS on the other hand has also its own advantages and disadvantages. It may work well whilst having good reception at take off, but may change during the flight especially when flying in an area that may restrict reception, just like flying near a mountain which will block some reception.
This can actually be seen in your data.
It shows at the start of flight value was reasonable but did improve during the first half of flight. But then got slightly worse again.
Needless to say the challenge is then to decide what will work best for you on the day you are flying.
A better system would be having a ground-station (QGC or MP) monitor the telemetry data during the flight and call out any problems like the GPS or indicate some strong winds are present (in MP).
You should look at some rangefinders for terrain avoidance. A fixed rangefinder forward and one downwards would be enough to stop running into something.
Something with at least 10m range should work like a tfmini+ to stop it in time but the longer range the better.
https://ardupilot.org/copter/docs/common-benewake-tfmini-lidar.html
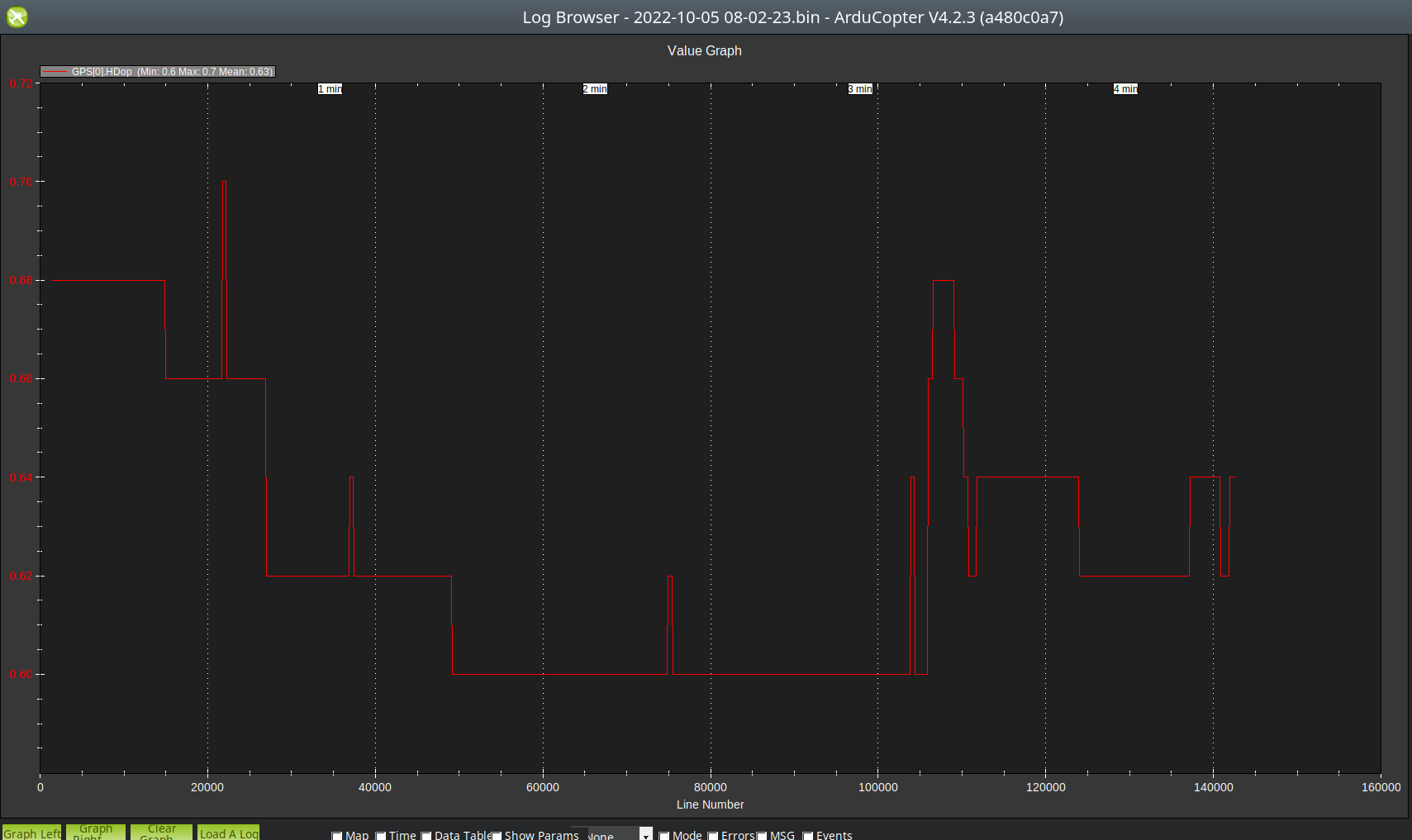
From your log it looks like Baro0, Baro1 and GPS all agree, don’t see any big difference between them.
We have been using Gps RTK for altitude for quite some time now as we need very precise altitude. With latest F9P Gps the altitude reading has been rock solid.
@MshUav
Good to know. Thanks
But I would think the other way using regular GPS and NTRIP signal may not work for Pedro as I would imagine in that location it would be difficult to pick up internet or a direct NTRIP broadcast.
Cool solution for independent operation. (Other than the actual GPS signal)
Thanks,
@Karl_Schoelpple
@geofrancis
@MshUav
We have 60 meters vertical discrepancy between baro and GPS, its more than 10 percent.
Its 10 meters off error every 100 meters.
Maybe it can be tunned??
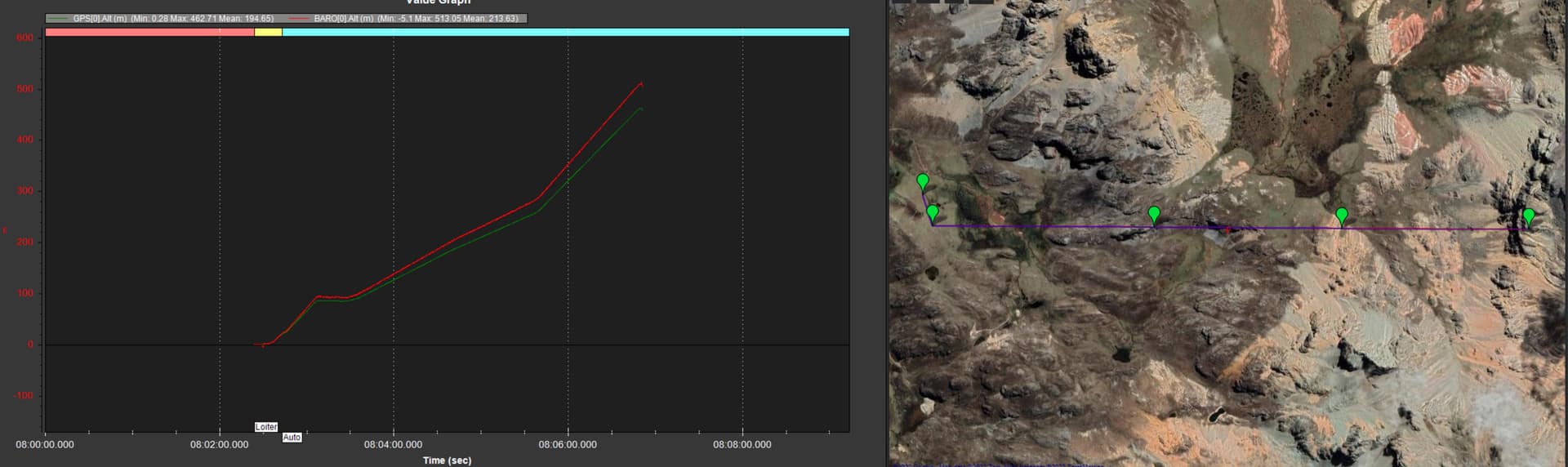
in this graph i “normalized” altitud to zero for better understand.
GPS data is from Here3 (ublox m8p)
I understand Ardupilot use barometic altitud for flight so not direct change if we use F9P GPSs. Only if we configure use GPS for altitude:
[EK3_SRC1_POSZ]
[EK3_SRC2_POSZ]
[EK3_SRC3_POSZ] parameters to 3 (GPS).
and [AHRS_GPS_USE] to 2 (Use GPS for DCM position and height)
Just to say about that, in past i already do some minor flight test whith this config (ublox f9p from ardusimple) and not convinced me. i see and hear the drone doing a lot of vertical corrections instead fluid sound (too much precise can be an issue?? ). I see with movement lost fix solution to 3dgps… i will try again with Talysman antenna instead Ublox antenna.
So… front and down sensors is good suggestion in PRX more than RFND setup…im not sure yet how setup this for the drone climb alone in case of obstacle in front. I think its automatic?
Cheers
With F9 you need to use a multi frequency antenna. We use gps for altitude and is very precise and doesn’t effect flight characteristics.
@MshUav ![]()
Do you know if by using the GPS as an altitude source, it is possible to level the home at the height of the DEM if it is different? (similar to baro offset)
Don’t know, we wait for rtk fix before take off so home is very precise but we do a totally different job than what you do. Anyway check arducopter online manual, there is everything on evey parameter in it.