I am using Pixhawk 2.4.8 and Pixhawk 4 Mini flight controller on my two of the quadcopters and using M8N GPS modules respectively. Everything is working fine.
What I am curious about is different types of GPS modules like RTK Chip and similar modules.
What makes M8N module differ from RTK module?
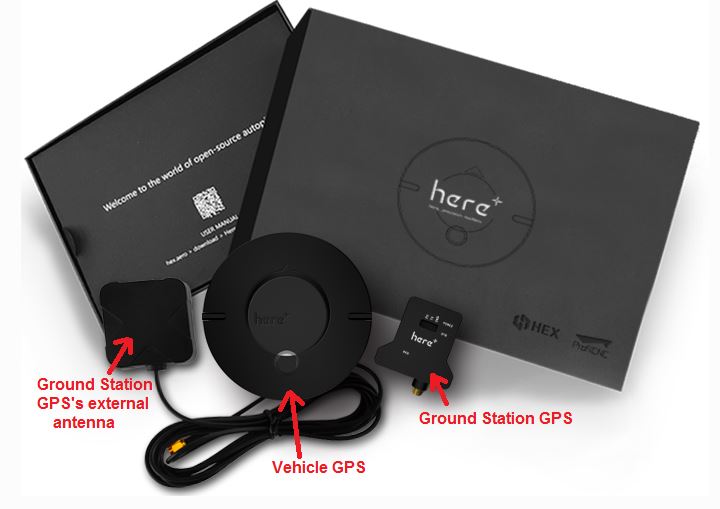
Why there is a ground module in Here+ RTK along with Air Module (aka rover)
Apart from 1cm accuracy, what extra RTK module offers?
What if I install Here+ RTK GPS with my Pixhawk Mini 4 FC? What extra it wil offer considering its higher price?
How it will perform in case of “GPS jamming”? Will ground gps module make up for the jamming?
I request you all to please guide me with GPS information, post this I will procure advance GPS Modules.
I’d like to add to the questions and also ask what do the commercial gps receivers offer compared to the regular ublox based autopilot gps units, like Emlid, Trimble, Garmin etc. can these be easily used if the offer 5hz on nema 0183? Is that all we need to consider when looking at potential gps units for ardupilot?
I am far from an expert that could answer all these questions. In my basic opinion you’ll be fine with an ordinary M8 series GNSS module for most copter use. Commercial applications may dictate the use of RTK for accuracy and avoid the use of excessive overlap of mapping grids, or venturing into no-fly zones.
Planes could definitely benefit from the M9N GNSS module as apparently it handles the roll and pitch angles much better (high roll angles usually associated with turning a fixed-wing at the end of a grid).
Obviously even a copter could benefit from an M9N if it’s within your budget but you dont need to extend to RTK accuracy and expense.
Thank You so much for the response. It was worth reading the topic you shared.
One quick question I have is, at what frequency does Ground Module communicate with Rover? The same GPS frequency or does it takes the nominal Rx TX 2.4 GHz.
@xfacta@Scott_Nunan Thank you for the response. In short, RTK setup provides accuracy and less chances of error.
RTK don’t implement communication between Ground Module and Rover, so it could be whatever you want or your board allow.
Becarefull, RTK don’t reduce errors ! It improves accuracy and precision, but the errors can still be there, and be worst that on normal GPS. Typically, on RTK you got under 1m accurracy, but you can have a sudden lost of RTK and that will make a GPS jump for more than 10m, that will be a bigger jump for the system, that expect constant 1m accuracy, than on normal GPS that expected constant accuracy around 2-3m
They might not be compatible with UAV Platforms. For example, the communication protocol ‘Mavlink’ is common between M8N, M9N, etc GPS and Pixhawk/Ardupilot flight controllers. Hence upgradation of modules is possible with mavlink supported devices.
I have multiple DJI Phantom 4 Pro GPS modules with me. I have tried soldering its gnd, VCC, rx,tx wires with Pixhawk 4 mini but it didn’t detected the module since DJI has different set of rules and not compatible with pixhawks.
Or in case you find a compatible device, they may offer you robust connection over hobby grade modules. May still hold on strong with GPS satellites even at 800 kmph speeds, extremely high altitudes and challenging weather conditions.
The point is - Keep the model connected with satellites no matter what. Different manufacturers uses different techniques to get the same results, in desired conditions.
Please help me with more clarification on it. Your words made me think that the ROVER module and GROUND module will communicate either on GCS telemetry frequency (433/915) or the transmitter/receiver frequency (2.4GHz).
But as per the link you provided, wireless communication in possible between Ground and Rover module irrespective of what flight controller or telemetry is installed in the drone.