Since have stepped in this hobby, I have multiple questions regarding various Flight Controller.
I understand that a flight controller is brain of the computer and make uses of various sensors to gather data and make the vehicle stable as much as possible.
So far I have used Pixhawk 2.4.8, Pixhawk 4 Mini FC on two of quads. Both of them offer more or less same flight attitude and stability but cost differently.
A pixhawk 4 mini costs thrice the price of Pixhawk 2.4.8. - WHY?
Please help me with answers of my questions :-
What makes a FC comparatively costlier? (Refer Pixhawk 4 mini vs 2.4.8)
What will I get more if I opt for DJI naza over pixhawk? Is it less compatibility?
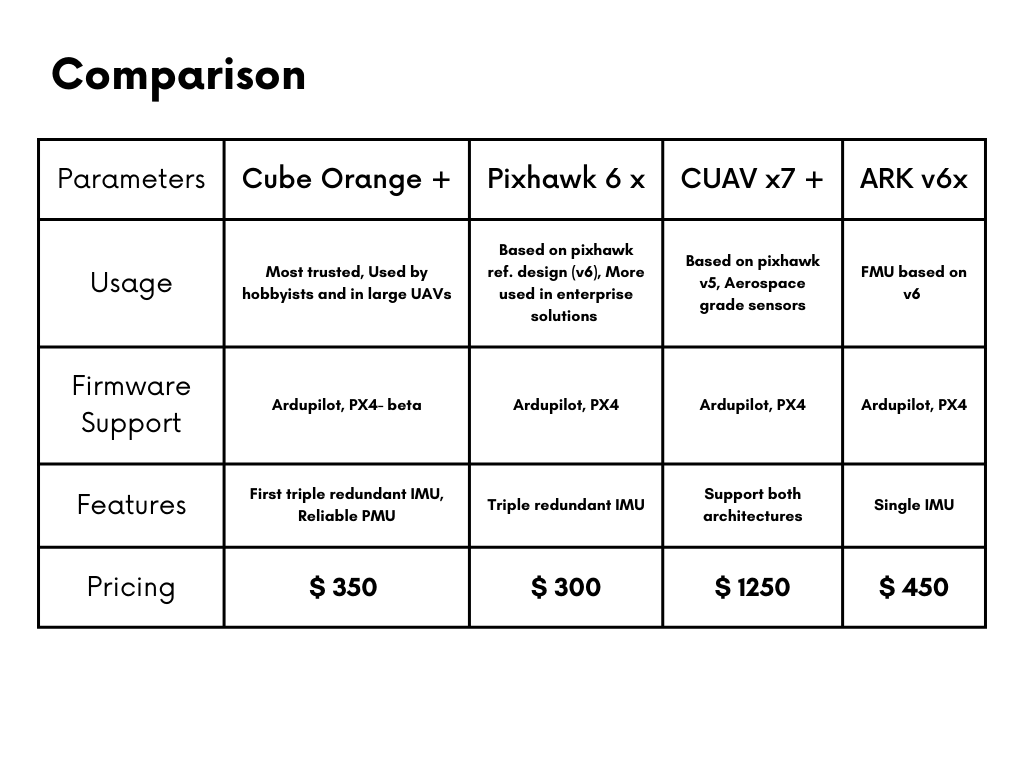
Are Pixhawk Cube Orange and Black (even more costlier) offer something extra ordinary and super robust flight over cheaper FCs?
Pixhawk CUBE Orange being very much famous in India, is it really the benchmark FC?
Why Racing quads doesn’t use Pixhawk family or DJI or CUAV FC (irrespective of size) if they are really good?
If I build a 1200mm frame quad, I can save a lot more on cost and weight if I opt in for Mamba FC over Pixhawk. Stack units are really small. Will it reduce the stability?
Will a 60amp AIO ESC same as 4 x 60 amp T-motor ESC? I don’t mind changing the ESC multiple times but saving weight is my priority.
How better is CUAV V5+ Flight Controller over Pixhawk 2.4.8.
Their price varies because the quality and number of the sensors varies.
A triple redundant board is bigger and more expensive than a non-redundant board.
mRo Pixracer pro is my main Jam. Jordy does not realy need any of my backing as he makes a ton of cash but from a flight stability it is hard to match. I also like the Zealot as you get all the cables super simple to install like the PRP.
Fpv racing quads dont need ardupilot, just use betaflight or whatever, ardupilot is a fully functioning autonomous vehicle controller and has capability to drive a myriad of hardware like servos, actuators, digital i/o, can/serial/i2c connected sensors and peripherals. All these capabilities allow it to control a vehicle to do something useful. Racing quads have a 4 in 1 esc and thats it. They are just toys and although can be flown using a pix and ardupilot, it’s certainly not the intended application
You can use ardupilot on a racing quad though it will be harder to tune everything than in Betaflight as neither MissionPlanner nor QGroundControl have nice GUI for setting parameters (there are dedicated GUIs for some stuff but they are mostly geared towards preparing autonomous operation and RC controls assignment).