Happy Friday night! Perfect time to review some logs with a brew.
I’ve been playing around with Throw Mode lately on a 5" quad. Lots of fun when it works, scary when it doesn’t. I’ve seen @gherve post a similar topic without seeing a satisfying solution so I hope I can add more data.
For context, when I throw this small of a quad, I can’t guarantee the same type of throw every time. I’ve tried pushing from the bottom, throwing it like a frisbee, tossing it upside down, etc. All of these throws result in similar behavior: an unpredictable and rapid ascent after the drone’s gyro levels out.
From looking around on the git, it seems like this mode has a hardcoded 300cm altitude increase. That explains 3m of ascent, but not the rest.
I’ve attached a total of 3 logs: two are partial successes and one is a failure which resulted in the quad inverting and crashing quite close to the launch site.
I’m having the same issue with throw mode. It levels out and then flies over 12m before stopping. It often doesn’t fly straight up either and goes a 10 m laterally as well.
Really sorry for taking 2 months to review this log.
I had a fairly long look at this and the best answer I could come up with is that that during the failed throw it took much longer for the vehicle to get itself upright and it lost altitude as it was trying to upright itself. I can’t say exactly why though. I don’t think it is a motor failure so I’m guess that it is the attitude controller tuning.
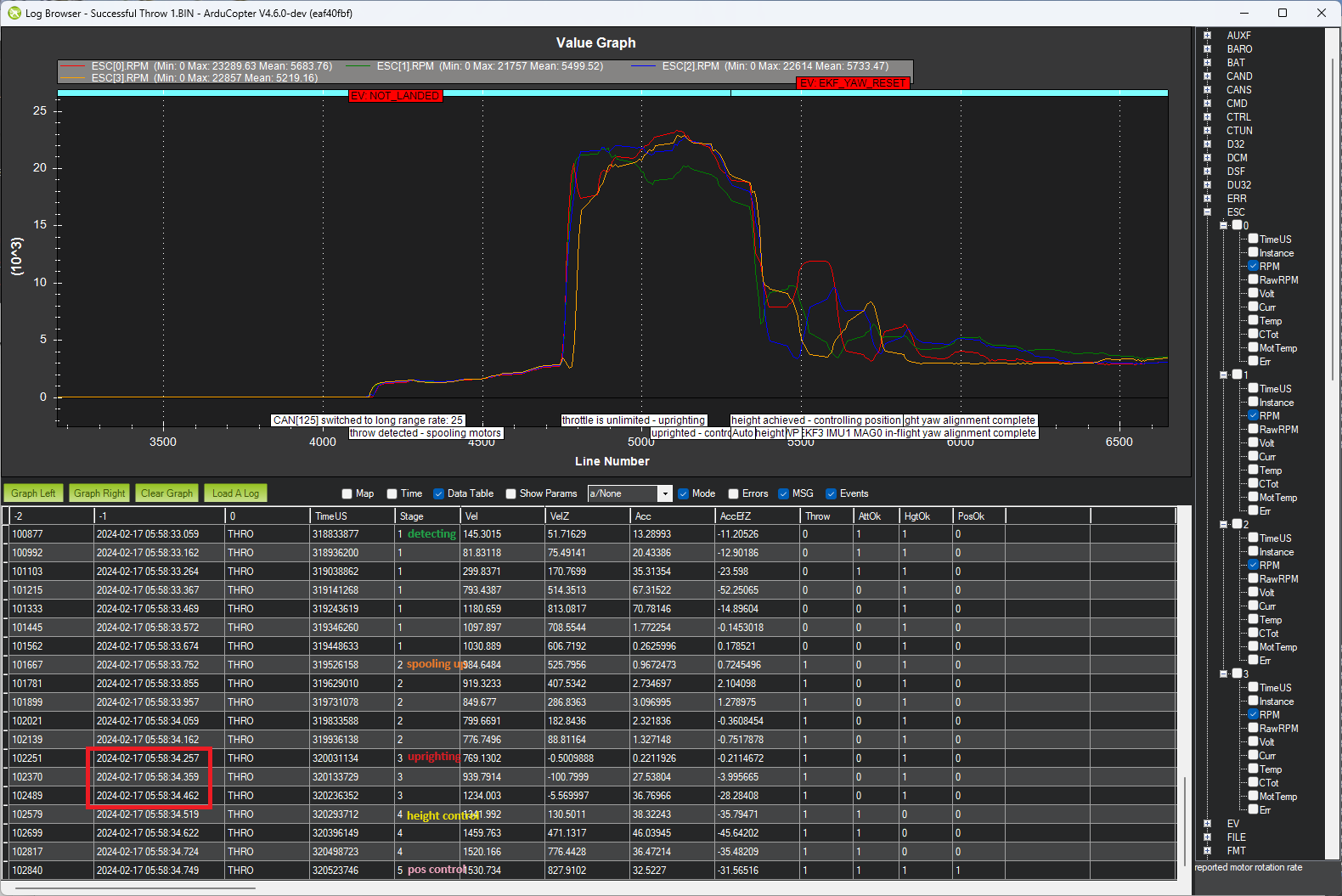
Below are the THRO log messages from the successful throw first and the failed throw second. From looking at the stages, we can see that in the successful throw the vehicle is able to right itself in about 0.3 seconds.
I thought it might be because of a motor failure but the ESC messages (shown above) show all motors were spinning.
The one thing that looks odd to me is some of the attitude gains appear very high
The maximum accelerations are at or above 400K. I’m not sure I’ve ever seen numbers higher than 150k
ATC_ACCEL_P_MAX = 399744.9
ATC_ACCEL_R_MAX = 469605.7
The angle P gains are also enormous. I’d drop the roll and pitch angle P gains back to about 12. Yaw should probably not be any higher than 6.
ATC_ANG_PIT_P = 28.8674
ATC_ANG_RLL_P= 27.49276
ATC_ANG_YAW_P = 13.67774
Maybe @andyp1per will have some more advice on tuning small vehicles
I have no experience with the throw mode (so far), but 286th second seems to be a moment of a hard desync for the left-hand-side motors (based on the discrepancy between RCOU.C[3,4] and the matching ESC[2,3].RPM).
So I would suggest looking at ESC firmware tuning.
Thanks @rmackay9. I just got around to getting some logs this morning, and throw mode is now working perfectly. It looks like this is due to the changes that were made to improve brake mode a couple months back. If you remember, it was advised that I adjust PSC_JERK_XY, and it seems that this has affected the positioning of throw mode for me as well for the better.
I tested 4.5.3 this morning. I have PSC_JERK_XY set at 30. I have a 7 inch copter with 4.5 inch blades so it responds quick. I’d imagine larger copters would need a lower value.