Discussions for ArduPilot software development. Please do not use this category to ask support questions. Thank you.
Just an update on posting to this group, in drones-discuss anybody could post to the group with Moderator approval without being a member of the developer team. We are working on a method to allow that to happen. In the meantime please contact a Moderator or Admin to request access.
Temporary, all users at trust level 1 and above can now see/create/reply on this category.
Where should I post a build problem (compiler error) with the latest source ?
@linuxguy123 post in the appropriate category for the source.
eg: if it is Copter 3.6 you are trying to build post it in the copter 3.6 category.
If it is Plane x.x, post it in Plane x.x
Excuse me; I’m some years user with Arducoter, only traditional copter and arduplane; I noted that with old firmware example 3.6 of plane or copter, if in the SD card there isn’t the folder TERRAIN, it will be created; instead with new firmware 4.X.X of plane or copter, if in the SD card there isn’t the folder TERRAIN, the plane or copter remain with file pending (not create the folder);
In many years I see some bugs, but I’m Italian, I don’t speak or write English very well, and for me is quite difficult to describe the bugs, also if I help me with translators, so excuse me.
I hope in future a collaboration with this forum.
Here is the diagram of the yaw control system in Ardupilot (plane):
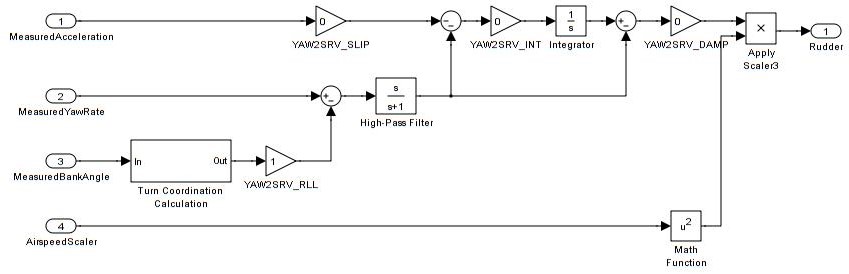
I can’t see anywhere where the requested direction of the vehicle is controlled in this diagram. Yaw rates are controlled, but not pointing.
Is it possible to add another input to this control system (perhaps even PID like pitch and roll axes) that is the yaw direction requested? This would give some flexibility for non-traditional vehicles where I just want the vehicle to yaw in the required direction, without major coupling to roll or pitch. It could be kept out of the normal control system with an enabling parameter perhaps.
Please confirm for me where the primary control for flight direction is provided in Ardupilot. Have I got the “wrong end of the stick” in my thoughts on this?
Thanks 