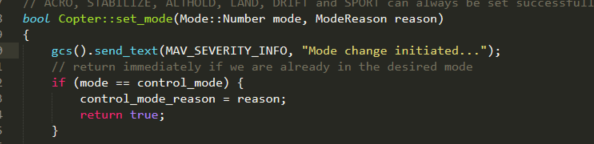
So here is the added code,
and build the code once more using the waf system.
alias waf=“$PWD/modules/waf/waf-light”
waf configure --board=navio2
waf --targets bin/arducopter
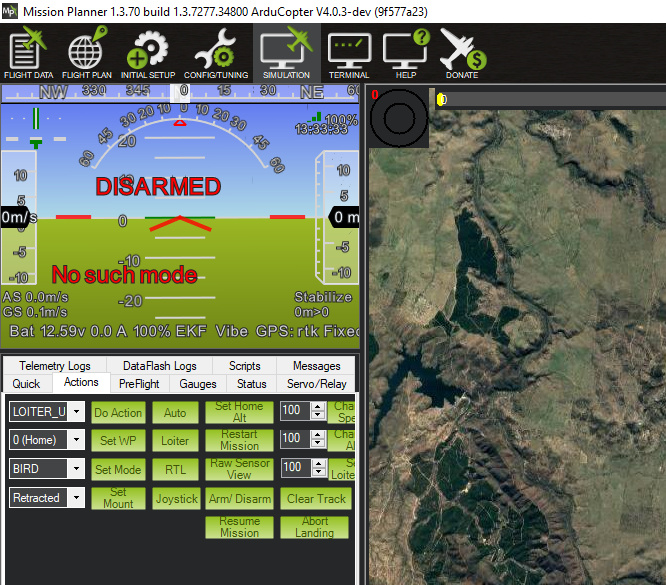
I am assuming the message should appear under the messages tab in mission planner, and here is the result after changing through different modes under simulation.
I switched through the first three flight modes, it looks like I am not running my built code?
Are you also using the waf system to compile your code?
Not sure how useful this may be but here is how I go about editing code:
with ardupilot cloned to my pi,
I use WinSCP to get the files I will be making edits to such as mode.cpp from the pi to my PC
Then on my PC, I make the edits using sublime text editor, save the file, then copy my edited file back to the pi via WinSCP
I set up the waf build system on my pi and compile the code.
I use putty as my terminal for the pi.
Sounds good to me! I will begin here and see how far I get. This is all new to me but I really appreciate all the help you all have given me and for being patient with me!
Update on the status of my issue. It was the fact that I was not running the compiled code and the link you shared with me helped me realize what I was missing, once I followed and experimented with the steps i was able to successfully implement my custom modes. So thank you again! I am really grateful.
Can you please tell how did you ran your ardupiliot in mission planner. I am trying in SITL but even after adding the new mode it shows unknown mode in the terminal.