Hi everybody,
Considering than in my previous test about gps glitches I was not able to identify the problem via info reported from tlogs, I’ve tried using wind simulation that comes with SITL, using SIM_WIND_* parameters.
I ran a normal mission on SITL, and , in the end, I activated the following weather conditions, while the drone was hovering:
Fly south east in loiter and test reaction to wind
Apply wind at Thu Mar 30 03:13:26 2017
param set SIM_WIND_DIR 90
param set SIM_WIND_SPD 50
Apply wind at Thu Mar 30 03:13:31 2017
param set SIM_WIND_DIR 180
param set SIM_WIND_SPD 30
Apply turbulence at Thu Mar 30 03:13:36 2017
param set SIM_WIND_TURB 20
param set SIM_WIND_SPD 40
…
Hit ground at 8.683764 m/s
The point is , being able to detect / extrapolate dangerous/inusual situations (bums, …), analyzing sensors data that comes with tlogs.
This is the interesting info from the test:
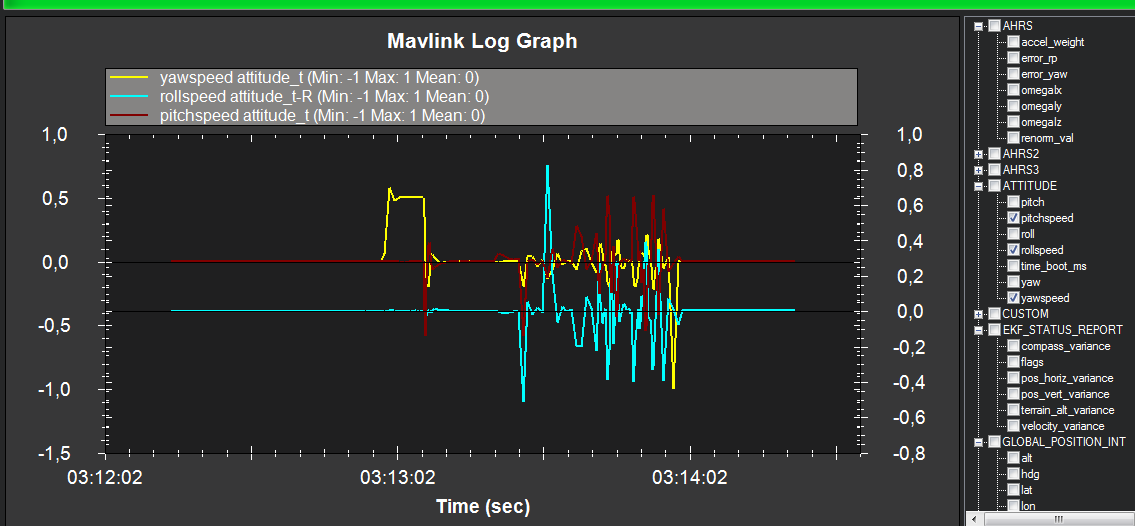
ATTITUDE (this one semms to be helpful)
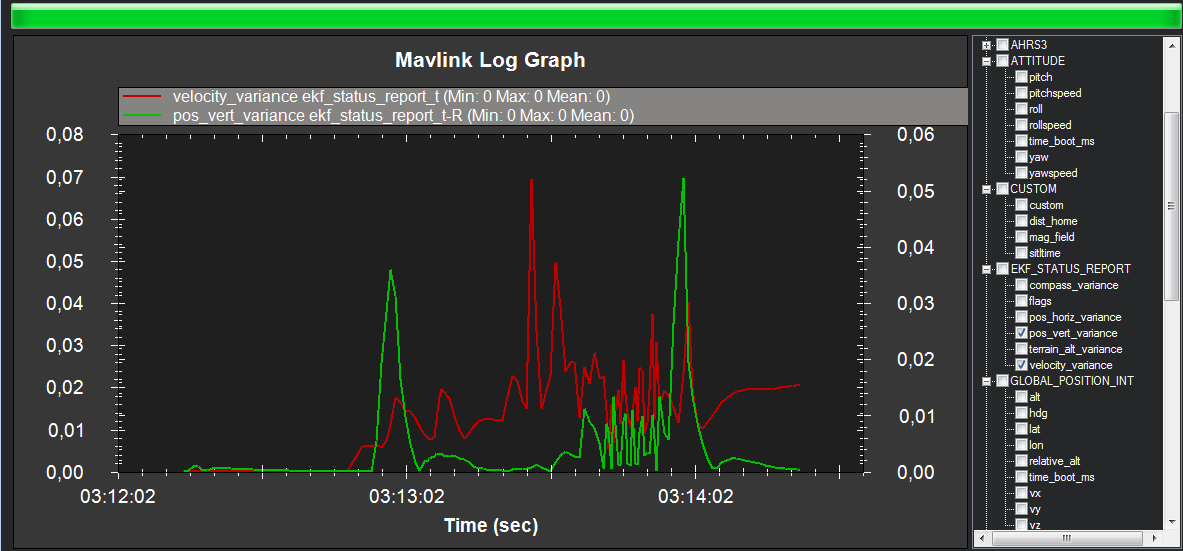
EKF (no understand …)
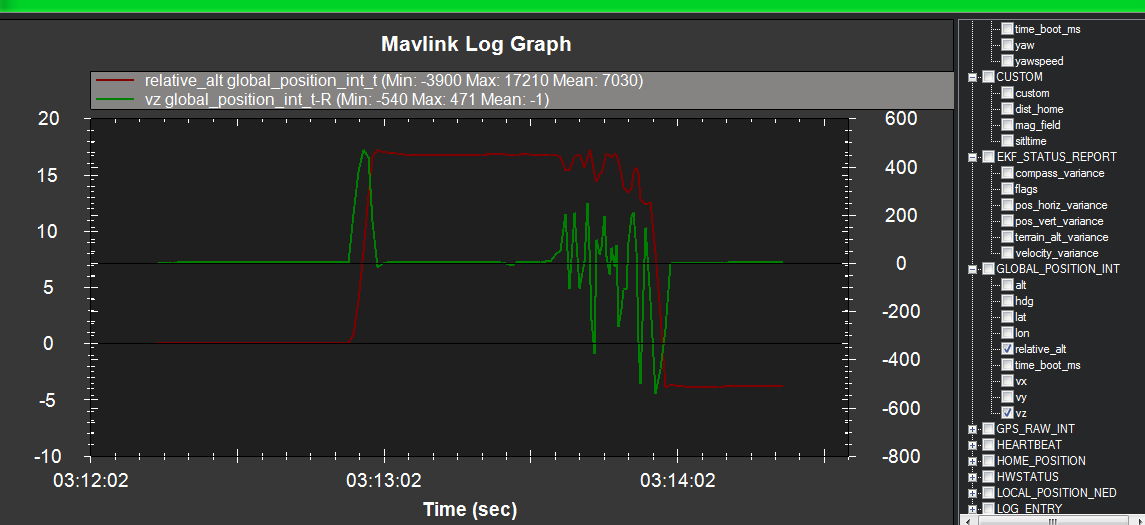
GLOBAL POS (lat and long didnt have data… these params dont really know its meaning)
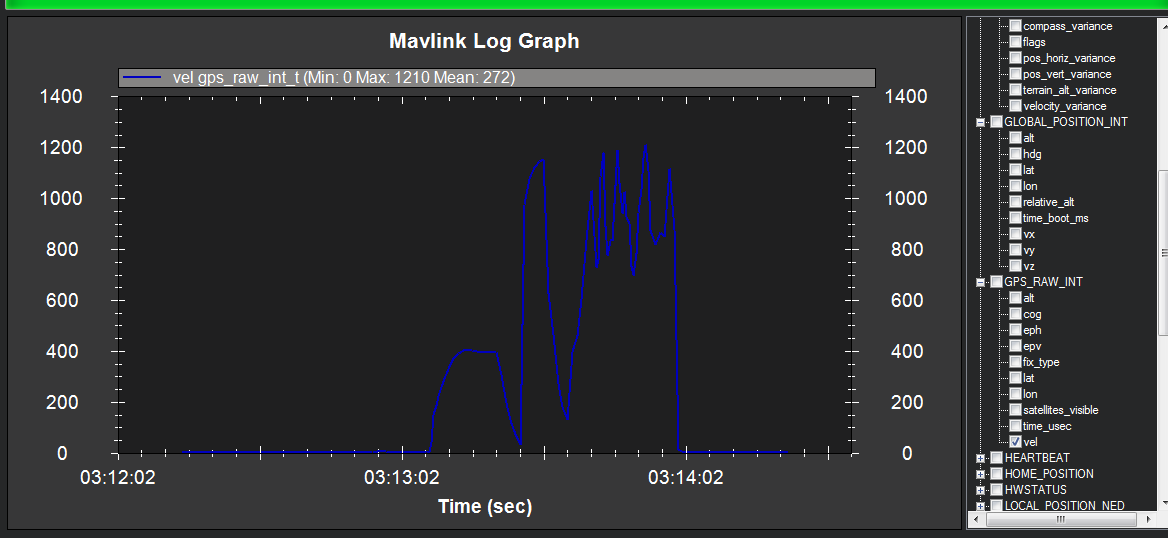
GPS_RAW
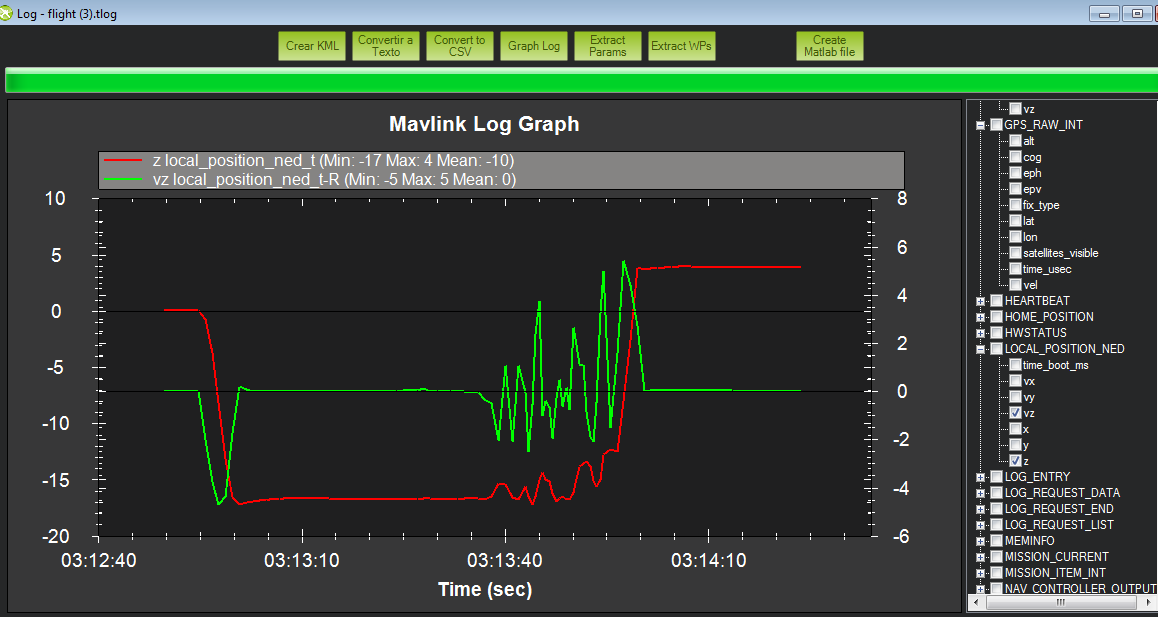
LOCAL_POS (any difference with gps ?)
NAV CONTROLLER

RAW_IMU (many info related to accel on different sensors, dont know which one is valid)

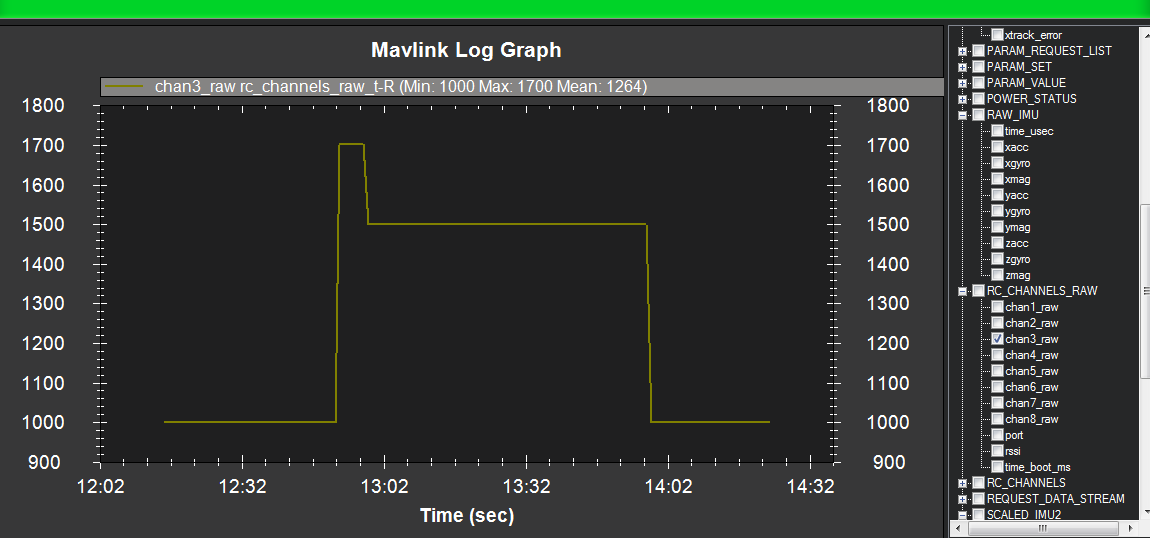
RC
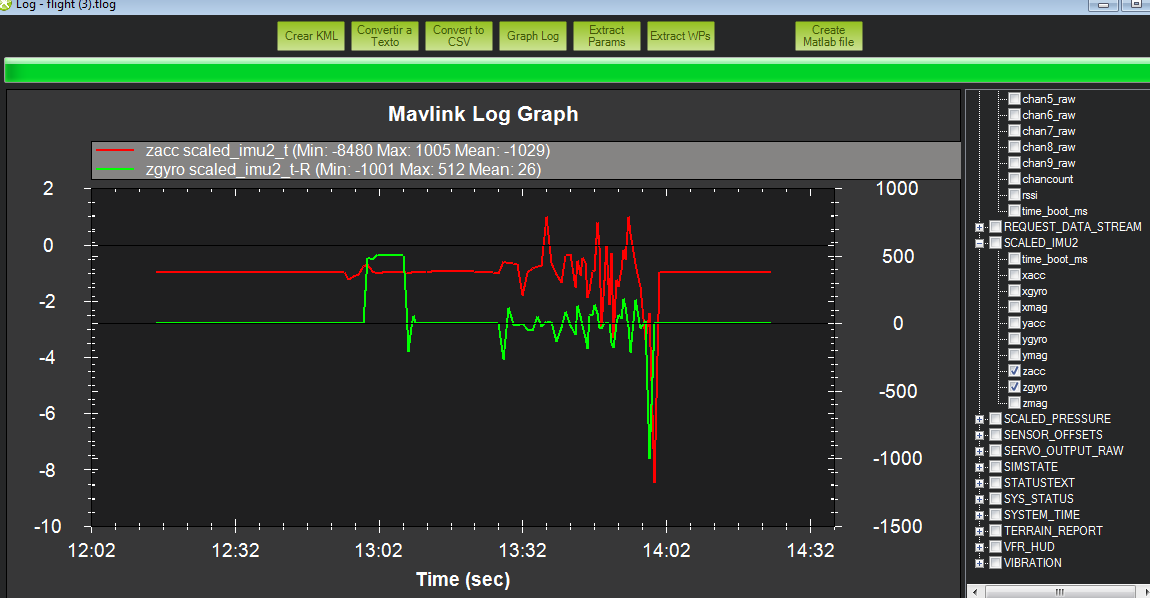
scaled imu (same as imu ??)
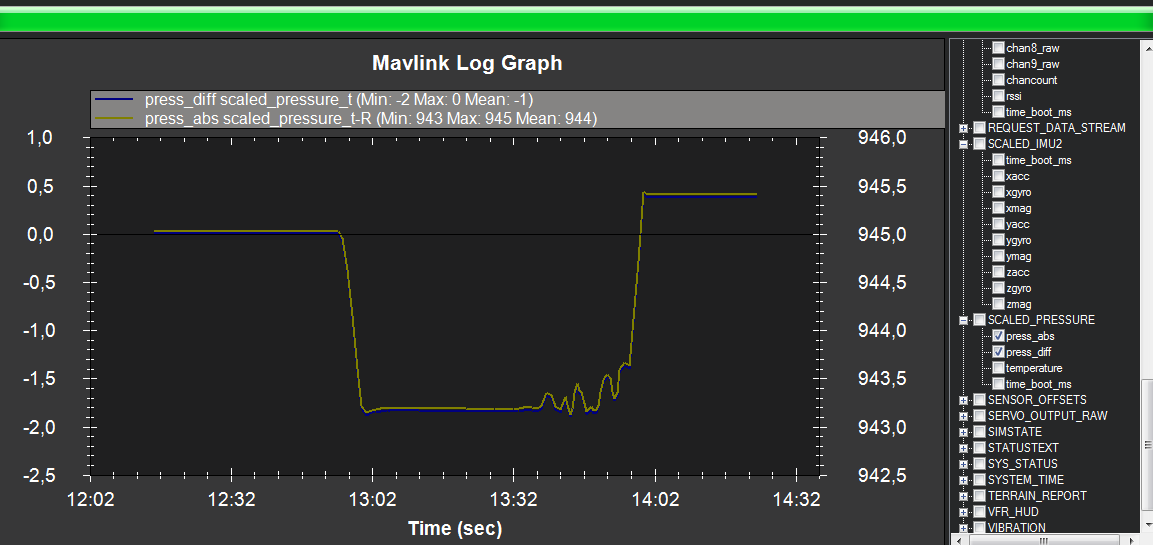
SCALED PRESSURE
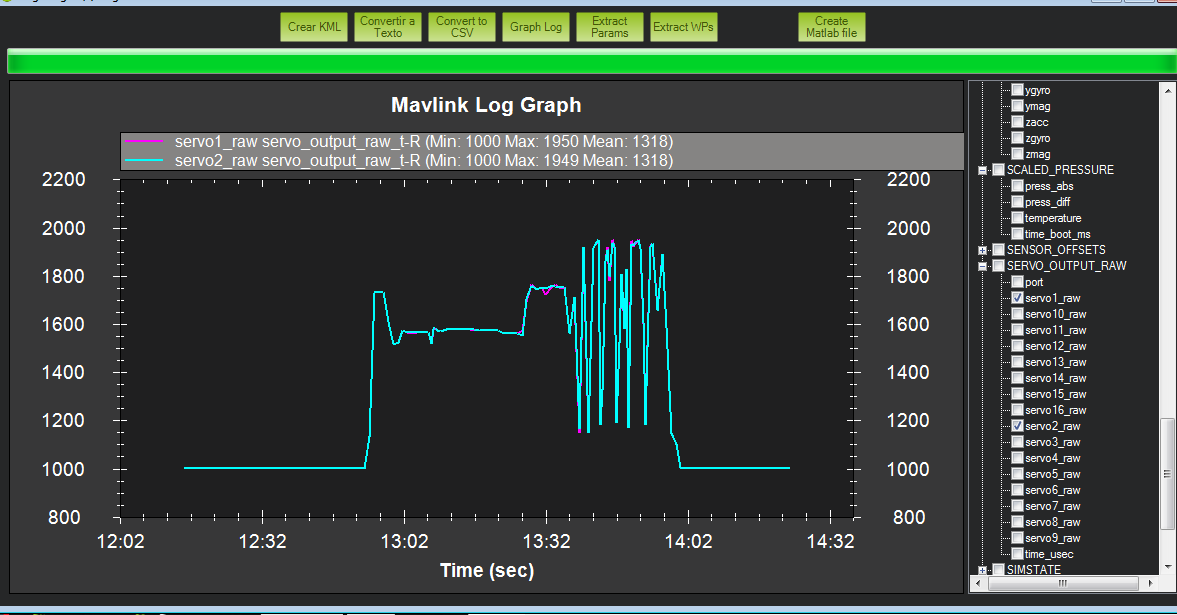
SERVOS
SIMSTATE 1 - seems only valid on simulations

SIMSTATE 2

vfr 1 - dont understand
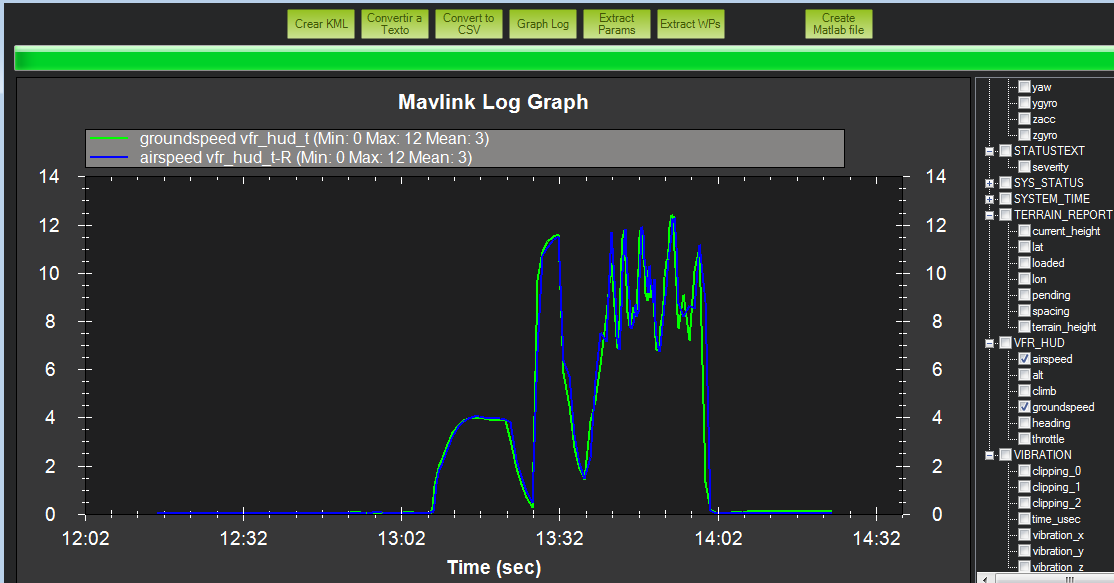
VFR 2

VIBS

I’ll be really really grateful with your opinion/support. I hardly understand the meaning of many info from tlog, even after readung mavlink documentation ![]()
Thnaks in advance