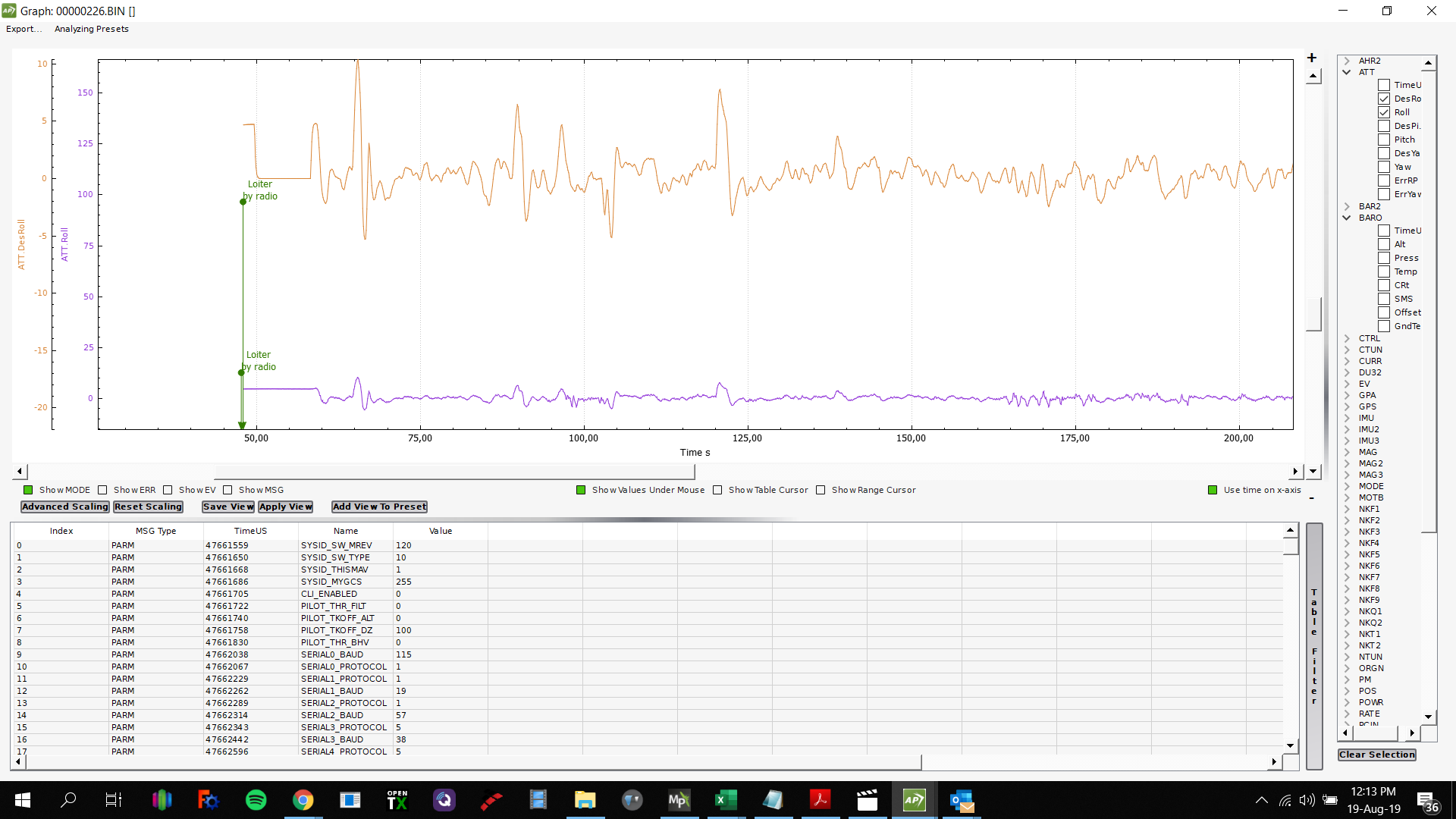
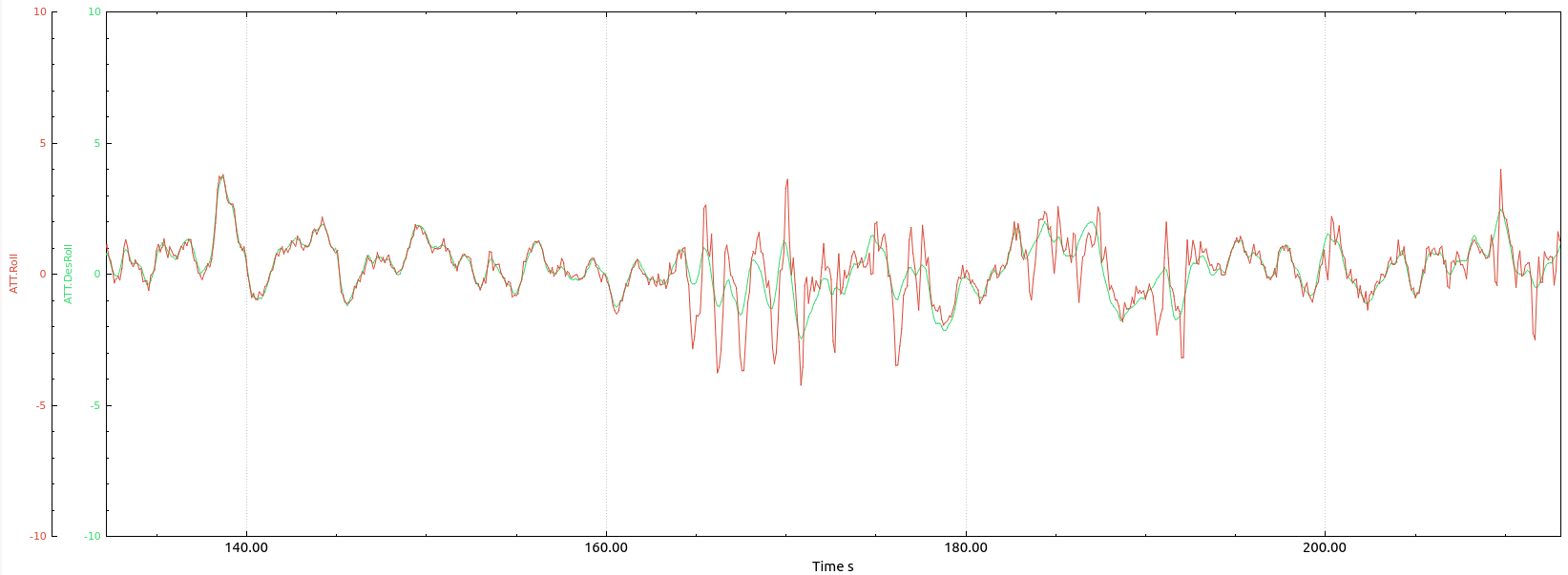
Hi! I’m going to have a quick look at your log file, but one thing to note is the scales on your Roll vs DesRoll are very different. If you go to “Advanced Scaling”, you can set them to have the same scale and get a better comparison.
This is likely caused by the crash flipping over. You wouldn’t have a DesRoll of 180 degrees, but you likely got close to that in Roll.
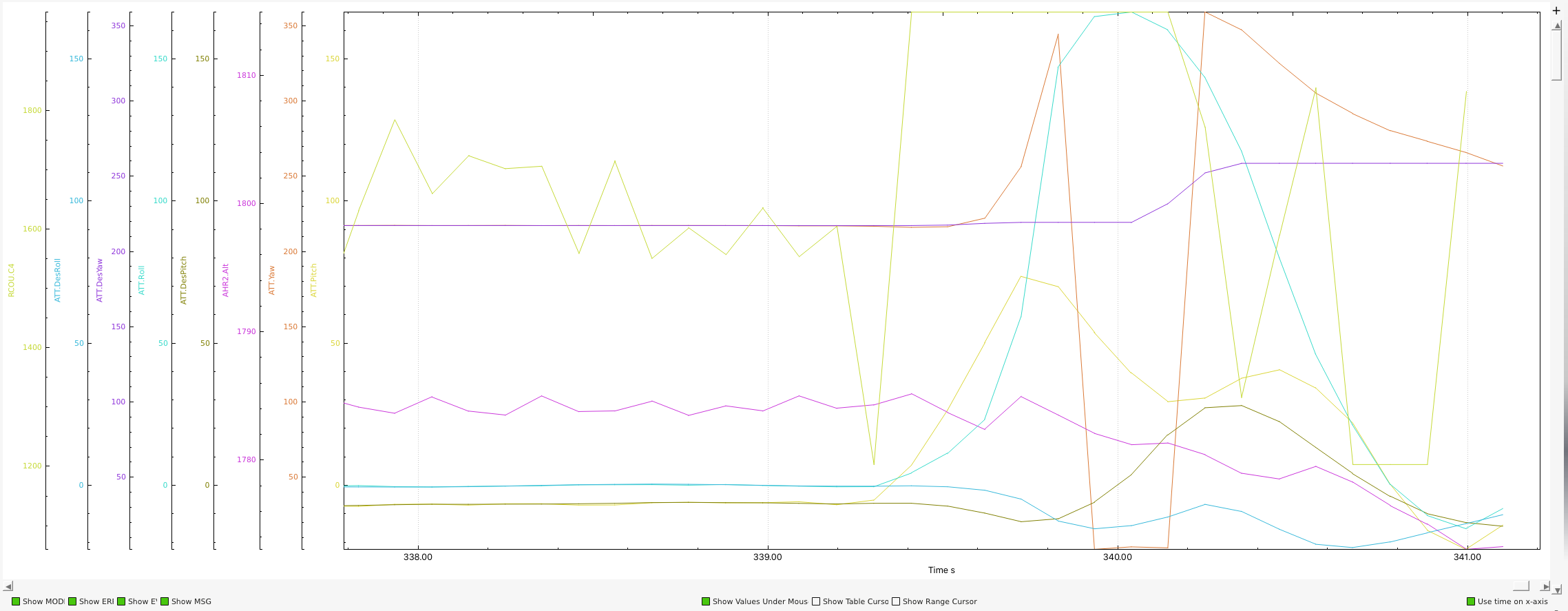
Right near the end of your flight, motors 3 and 4 had pretty wild changes in output (see RCOU.C3 and .C4). It also looks like it had a bit of an uncontrolled spin on the way down for the crash (ATT.Yaw vs ATT.DesYaw).
Yes, I saw that, that its what im trying to figure it out. When I have recieve the drone I plug it in and all motors works just fine.
I have a theory about the battery plug, I have realize some people doesnt plug the XT90 until the end, and may be in that moment the drone needs more power and the plug couldn´t give the power and bam, to the ground.
The other theory is the drone crash with something, I was checking the IMU ACC and Gyros over the motor failing, but is not clear to me.
How can you realize if the drone have crashed with something with the telemetry?
You can see here M4 going to max, while its opposite M3 goes to minimum.
But as you now have a yaw imbalance M1 and M6 are increased while M2 and M5 are decreased.
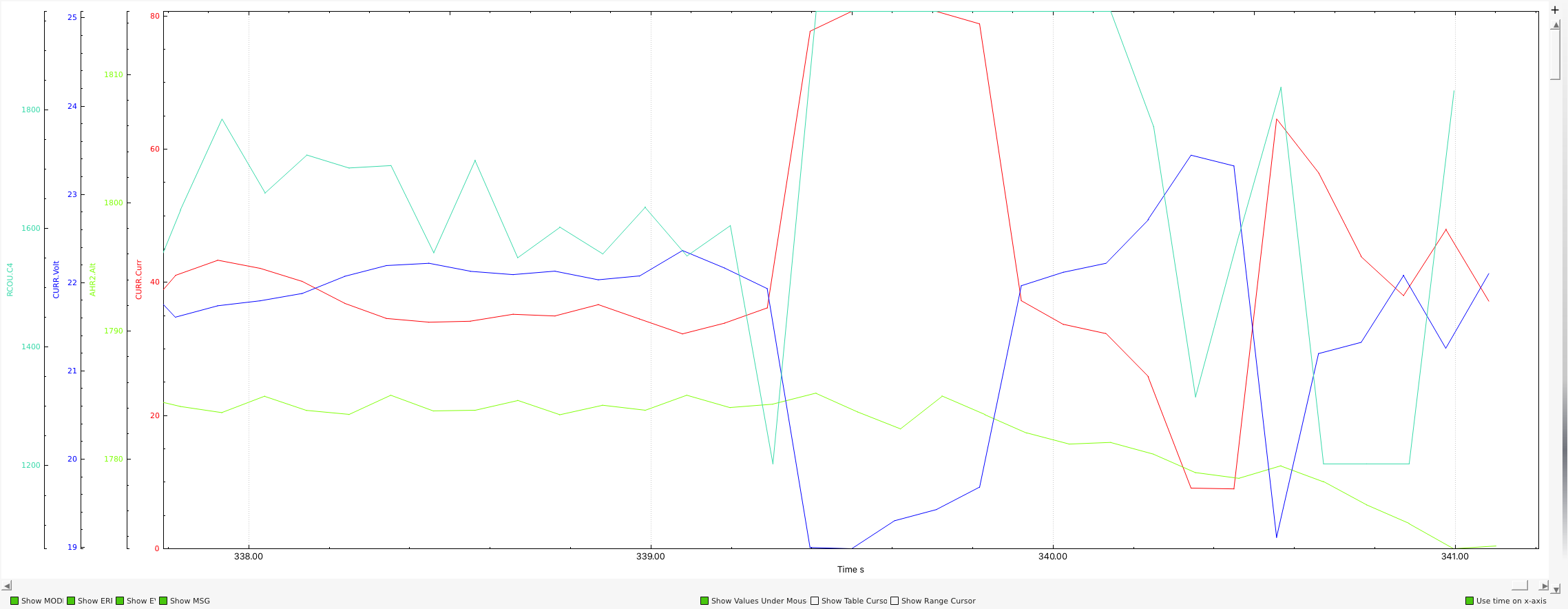
Unfortunately this is not enough to remain stable.
You can see here that the motor loses thrust then shortly after the Desired-v-actual departs.
By logs, graph all RC outs. The failed Motor(or ESC)'s RC out will go to maximum, & The opposite motor’s RC out will go to minimum.
Swap the suspected motor with another one & if the problem follows the motor, it may be damaged.
If the problem stays in the same arm (motor position) , it might be the ESC.
@ambattuhari. Thank you for the reply. Just checked the esc with a multimeter. One of the 3 phase outputs is shorted with the + of the esc. Any reasons as to why the esc malfunctioned. Also how do I check if the esc is working properly? Is the short circuit test enough?
@ambattuhari. Thank you. Although the esc failed mid air the drone didnt flip over. It just tilted a bit and dropped in altitude before the crash check was activated. Shouldnt the drone flip if a motor fails
Dear friend, you are posting in Copter 3.5.
If you are using the latest stable version (4.0.1) ask in the appropriate section to get more visibility.
Describe your vehicle, with all the hardwares & what problem you faced , so that some experts will reply.