Hello,
I am on a hexacopter project using ardupilot (arducopter) 4.3.6.
Recently, one of our UAVs (Hexacopter/+type) showed abnormal behavior. We have 9 other UAVs with the same configuration but they does not have this problem.
In a Loitering mode,
When it takes off in Loitering mode, it starts to rotate in yaw (CCW) direction.
I commanded the yaw control to be PWM 1600 and it was static in yaw direction, but I had to keep control the yaw to make it points out front from a pilot.
Ground test with Stabilized Mode
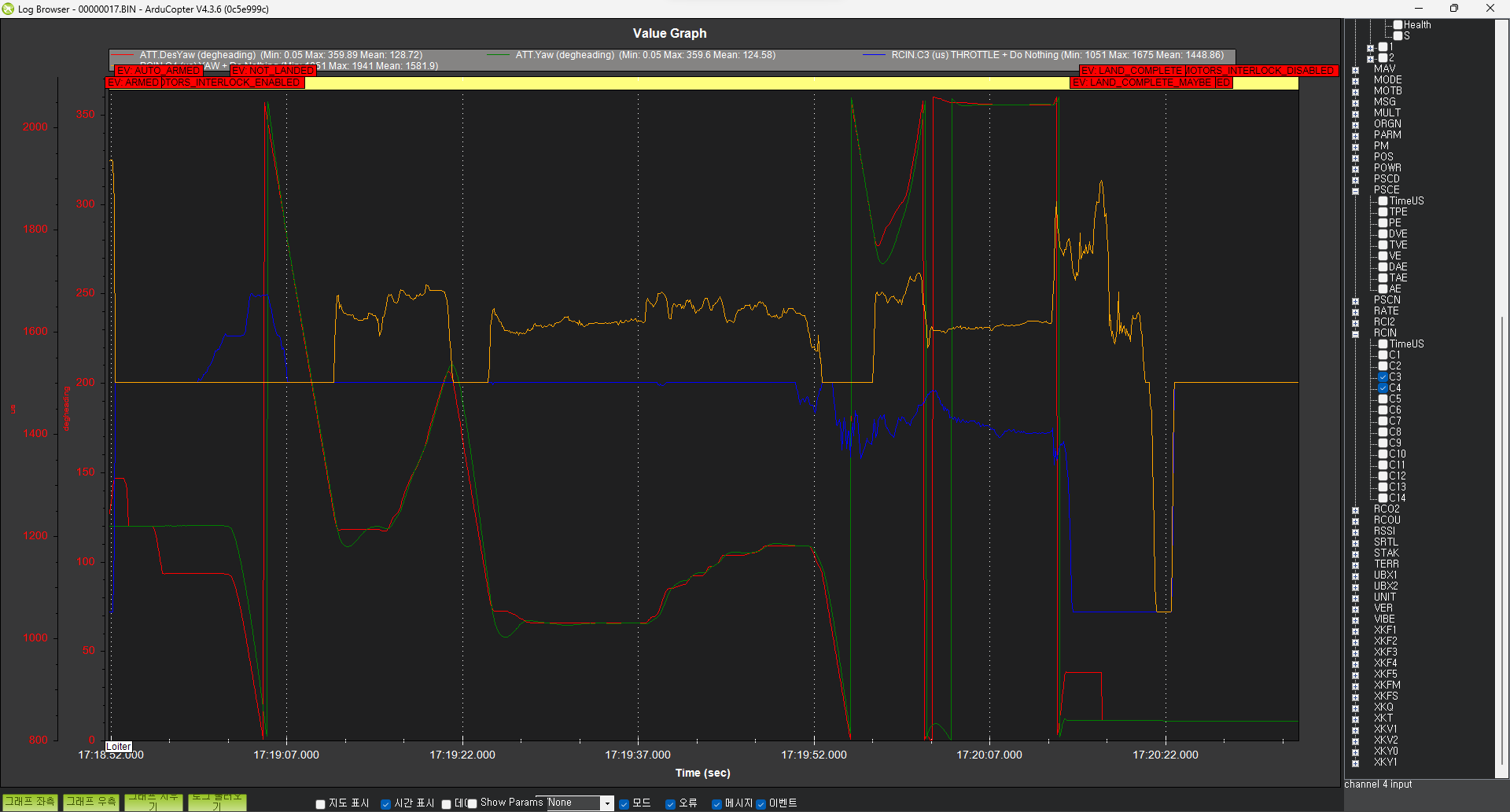
I checked the vehicle on the ground, at stabilized mode, and found that the desired yaw has offset from the current direction once it is armed.

The yellow line is throttle and the blue line is yaw RCIN. The green line is desired yaw. After it is armed and the throttle starts to increase, the desired yaw is decreased from 36 deg to 9 deg.
What I’ve done is,
- Compass Calibration
- ESC Calibration
- Applying GPS-for-yaw
What else should I have to check? I need your help.
Thanks and have a nice day!
Best regards,
Geon-Hong.