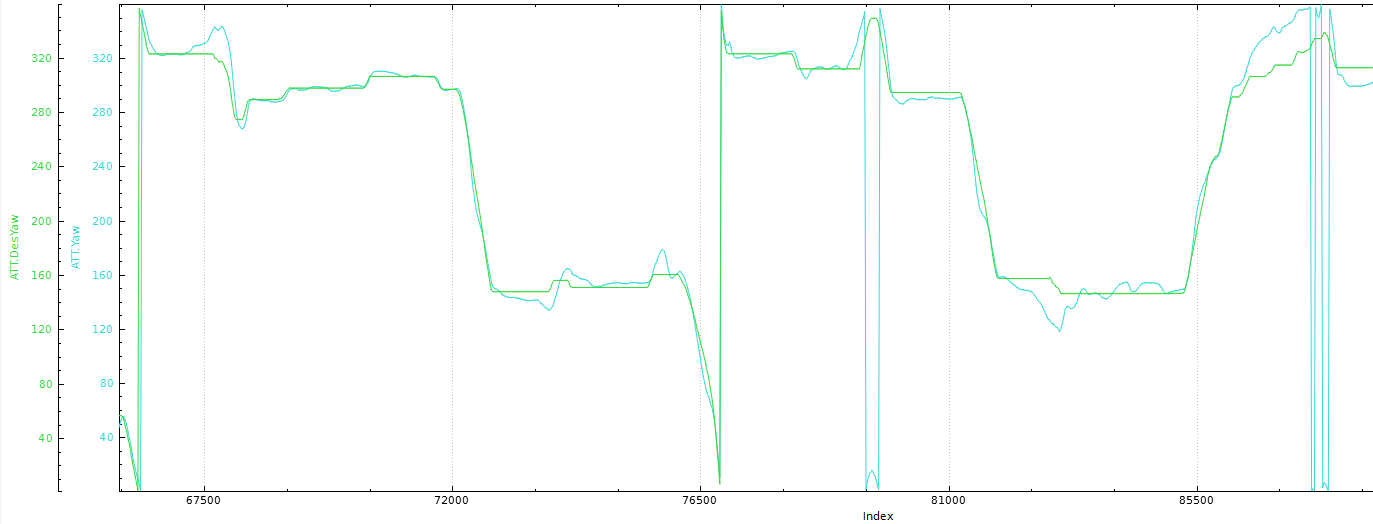
Does someone has a quick idea what may cause the discrepancy. I noticed while flying forward a little faster, that the copter performs a roll combined with a more severe yaw rotation. It was not really possible to counter the yaw rotation while flying fast To do so I have to slow down and turn. The frane is balanced and the ESCs are calibrated. Unfortunately, the compass was not logged, but it is mounted 20 cm over away and loiter works well. In the logs I observed spikes or gaps (don’t know how to call it). I am not sure whether this is associated with my observation.
You aren’t logging the RCin and RCout so I can only speculate, but, as you approach max speed there is not enough differential thrust left between motors to control yaw.
As you get faster you probably also notice altitude suffers as well.
I had built a Y6 camera ship for speed where I discovered this effect.
Yes I could get to good speed but could not turn until I backed off.
I think, I was not at maximum throttle, but I guess I have to get some better logs. I wonder why RCOut/RCIn and compass is not enabled by default. I remember it was?
 To do so I have to slow down and turn. The frane is balanced and the ESCs are calibrated. Unfortunately, the compass was not logged, but it is mounted 20 cm over away and loiter works well. In the logs I observed spikes or gaps (don’t know how to call it). I am not sure whether this is associated with my observation.
To do so I have to slow down and turn. The frane is balanced and the ESCs are calibrated. Unfortunately, the compass was not logged, but it is mounted 20 cm over away and loiter works well. In the logs I observed spikes or gaps (don’t know how to call it). I am not sure whether this is associated with my observation.