Hello,
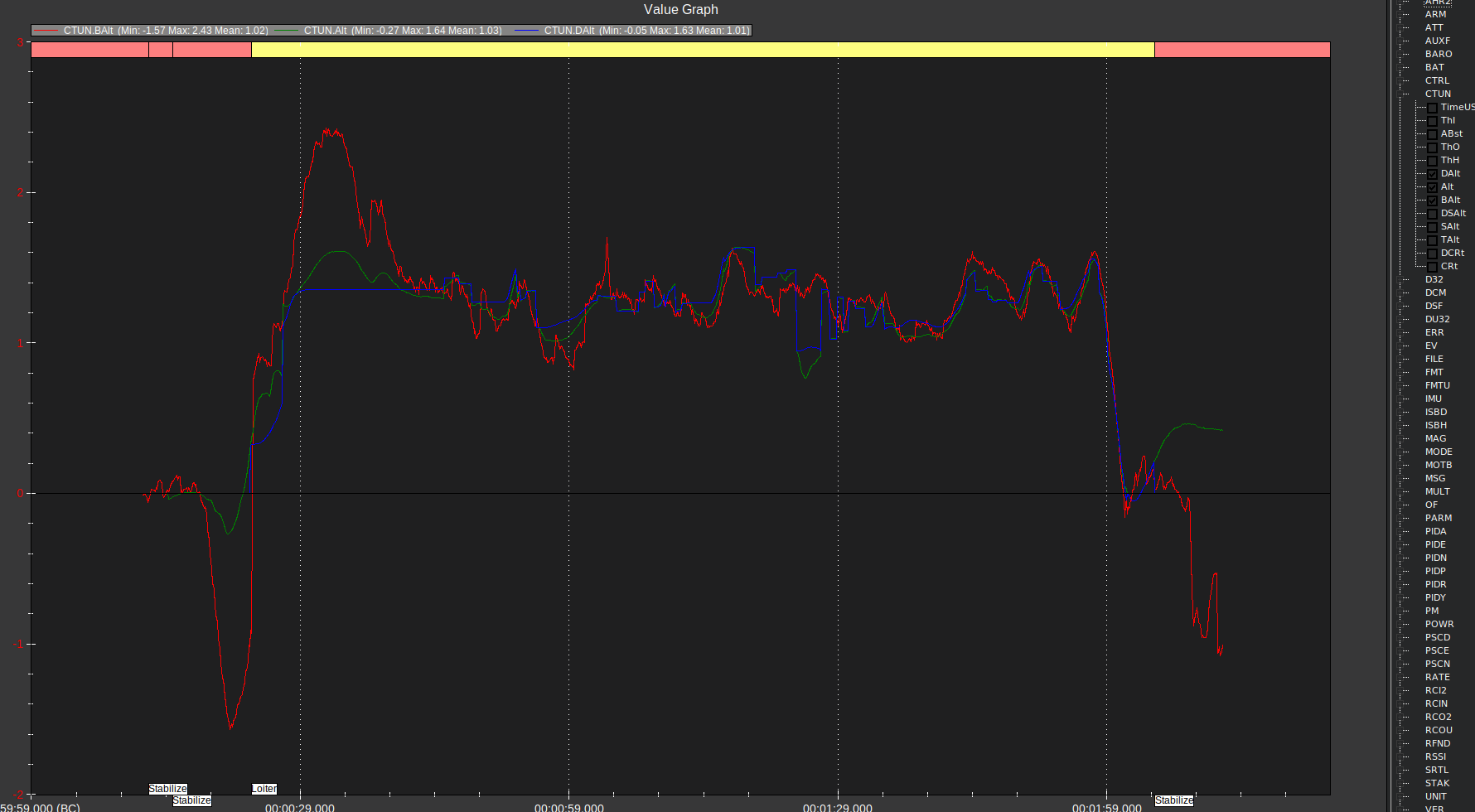
I have an issue flying my small non-GPS quad in loiter mode. The altitude is changing sporadically without any throttle input from my side. The change is within 1 meter usually but sometimes goes bigger than that. Looking at the log I see that the desired altitude is changing but I don’t get the reason why:
The quad is fitted with the OPTICAL FLOW 3901-L0X from Matek, and the rangefinder on it is configured as the secondary POS_Z source for the EK3, however it’s not giving me continuous data above 1m.
Does anyone know what could be the reason for this? I would expect the desired altitude to be constant and the relative altitude to follow it closely.
Hi,
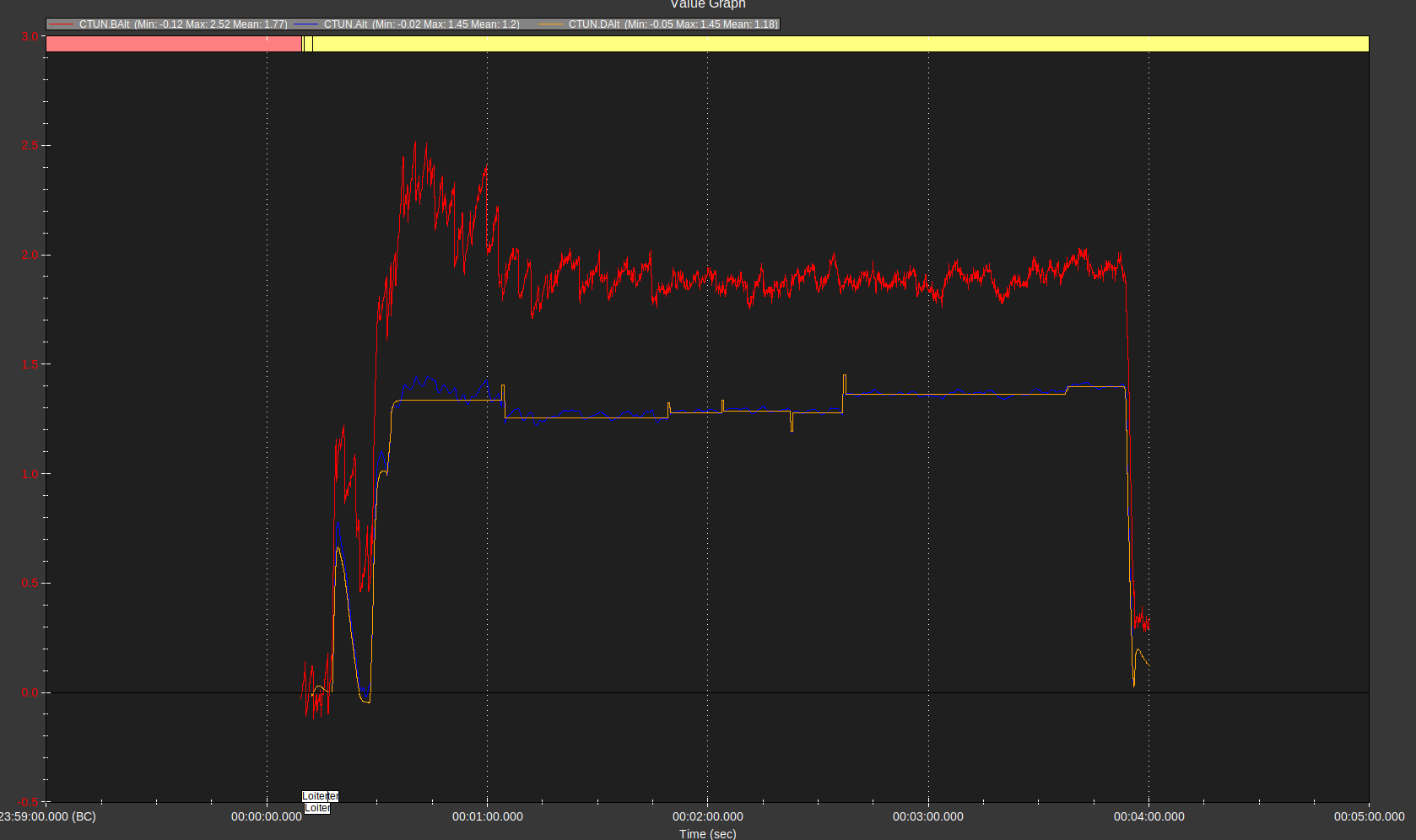
Thank you for the info, my baro was indeed exposed. I didn’t believe that covering it would help too much but it really did. The altitude is much more constant now. But I see something strange on the log. The altitude reported by the baro seems to have an offset from the real altitude. I flew the drone at about 1.5 meters and here is what I’m seeing: