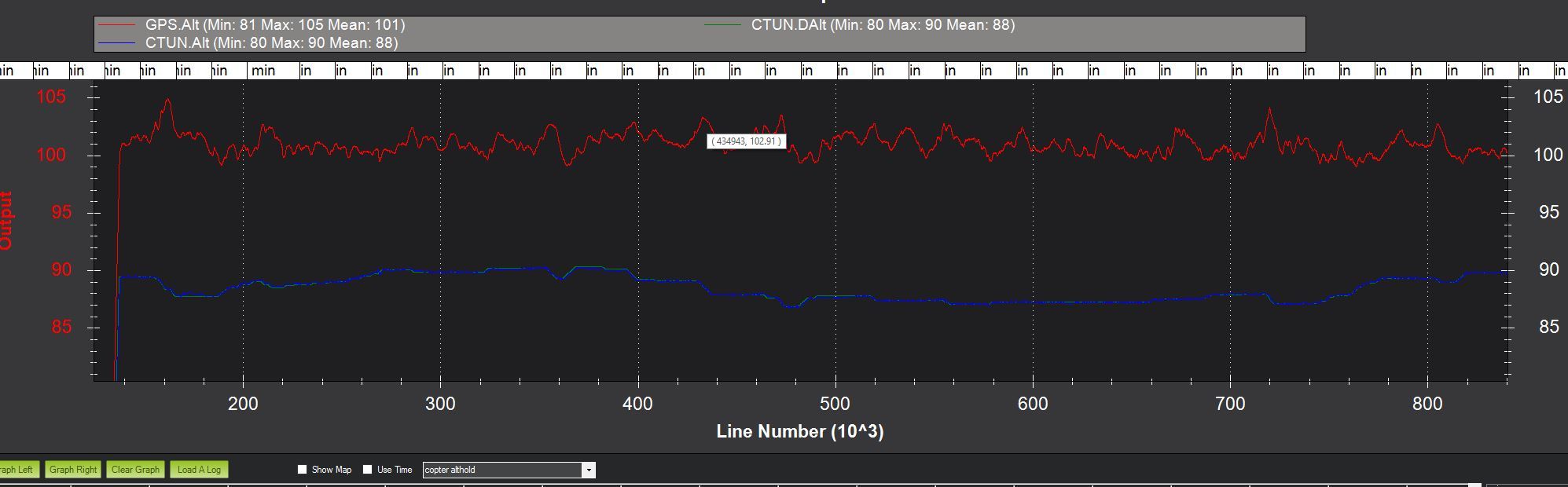
I’ve been seeing something in our logs that’s more obvious as we push the flight times up. We put the multirotor in guided and send it to a specific altitude and leave it there for a while. In this case, 91 meters. The ‘alt’ in mission planner gladly reports a number really close to 91m during that time. In the post-fligth data log analysis, one can see the desired alt is being adjusted quite frequently up and down a bit. The telemtry link is on during the entire flight, no internet on the laptop. Terrain feature is disabled. Is there some long-term gps alt correction smarts that I missed in the release notes somewhere? Any thoughts or guidance is appreciated.
This log is large as it’s about an hour long. Picture included.
What altitude source are you using? Over an hour the barometer can change quite a bit, However, it’s unlikely a changing barometer would account for the short-term variation you are seeing
I’ve not looked at hte log, but other factors could include propwash changes over the baro, sunlight heating the baro up as it hangs in the sun for a while, actual barometric drift ( ie weather) as Jeff suggested , etc. Also it’s quite common for “desired” gps targets to move around particularly when sats come and go ( natural movements of the sats) and vehicle moves or tilts to affect the effective visible sats )… then there are things like error margins in the other sensors causing the EKF to change it’s estimate/s of where it is, and even how much weighting it gives to preferencing one particular sensor over another. hope this helps.
It’s just using the basic capability for altitude estimation. No rangefinder is installed or enabled.
I’m not saying we have a barometer issue. It looks like it’s working quite well. I’m familiar with the pressure altitude drift over time of flight and the landing potentially being at +4 or -5 meters relative altitude, for example.
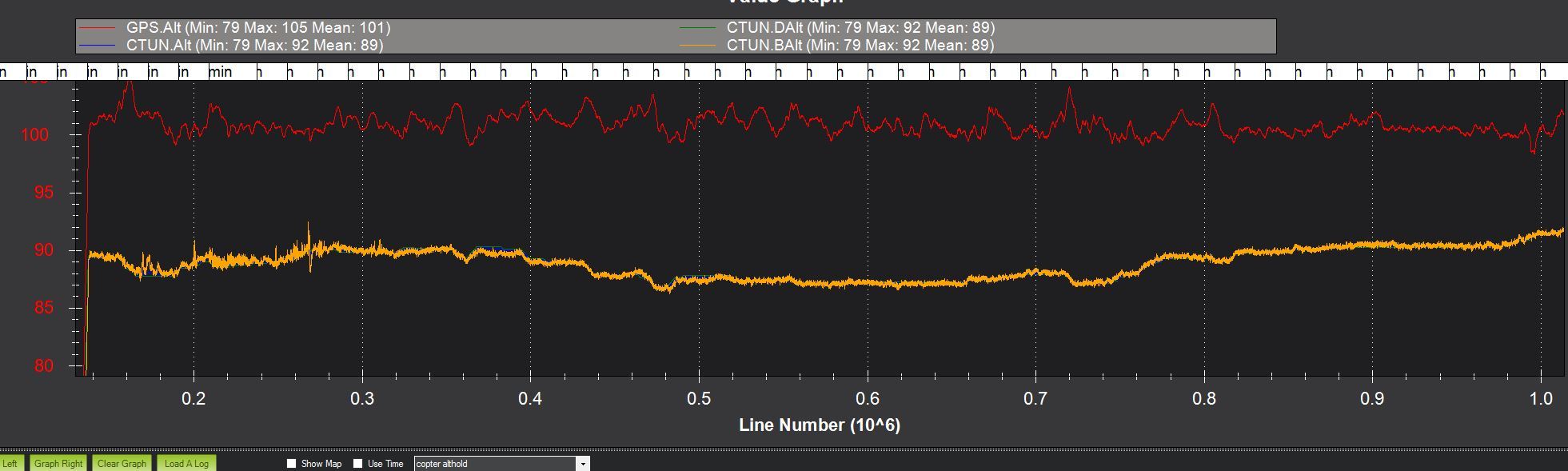
I am saying that it appears there are some smarts somewhere to tweak the desired alt to keep the relative alt close to where it began. Here’s a shot of the pressure alt on top of the desired and estimated. It looks great, my concern is I sent it to “91m” for a long time and the log has this activity. BTW, the landing was at a relative 1.3m after an hour.
I don’t think barometer drift wouldn’t explain the variation in barometric altitude. The barometer would think that it was always at 91m despite general atmospheric changes. Of course, the actual altitude would drift, but not the barometric altitude. The barometric altitude and the relative altitude are very close as well so it doesn’t appear to be a discrepancy related to vibration of the accelerometers.
I think that goal would be a bit like trying to lift yourself off the ground with just a rope and bucket (ie no tree branch, pulleys sky hooks etc) Algorithyms to adapt to the variations the guys indicate like barometric changes etc would be unwieldy, complex and costly.
Also there would be a direct correlation between price, power, accuracy so where would you stop?
 Algorithyms to adapt to the variations the guys indicate like barometric changes etc would be unwieldy, complex and costly.
Algorithyms to adapt to the variations the guys indicate like barometric changes etc would be unwieldy, complex and costly.